ISP
AmebaPro2 has a video engine integrating following function block: sensor driver, image signal processor, OSD and motion detection. The following chapters describe the software flow to setup AmebaPro2 ISP function.
Sensor Driver
AmebePro2 supports single sensor input with ISP engine processing and output up to 4 channel with independent configuration. Based on AmebaPro2 Spec, ISP can support up to 5m resolution (but fps need to be calculated by bandwidth limitation). In this chapter, we will introduce sensor driver information such as sensor list and sensor configuration.
Sensor list
RTK will update support sensor driver regularly. User can contact RTK-FAE to get newest sensor list. The following table shows support list with sensor information.
Vendor |
Sensor |
Max Resolution and FPS |
Description |
|---|---|---|---|
Galaxycore |
GC2053 |
1920x1080 * 30 |
|
Galaxycore |
GC4653 |
2560x1440 * 15 |
|
PrimeSensor |
PS5258 |
1920x1080 * 30 |
|
PrimeSensor |
PS5270 |
1536x1536 * 30 |
|
SmartSens |
SC2336 |
1920x1080 * 30 |
|
SmartSens |
SC301IOT |
2048x1536 * 20 |
|
SOI |
JXF37P |
1920x1080 * 30 |
|
SOI |
JXF51 |
1536x1536 * 30 |
|
Sony |
IMX307 |
1920x1080 * 30 |
With HDR |
Sony |
IMX327 |
1920x1080 * 30 |
With HDR |
ImageDesign |
MIS2008 |
1920x1080 * 30 |
Sensor configuration
User can check supported sensor list and sensor settings is in “project\realtek_amebapro2_v0_example\inc\sensor.h”
Setup
Check sensor list
First, check whether your sensor is in the list or not. If not, add your sensor by below steps.
Take “SENSOR_SC301“ as example, add sensor parameters to the list. (refers to the words in red)
1 #define SENSOR_DUMMY 0x00 //For dummy sensor, no support fast camera start
2 #define SENSOR_SC2336 0x01
3 #define SENSOR_GC2053 0x02
4 // …
5 // …
6 #define SENSOR_PS5268 0x0F
7 #define SENSOR_SC2310 0x10
8 #define SENSOR_SC301 0x11
9
10 static const struct sensor_params_t sensor_params[] = {
11 {1920, 1080, 30}, //DUMMY
12 {1920, 1080, 30}, //SC2336
13 {1920, 1080, 30}, //GC2053
14 // …
15 // …
16 {1920, 1080, 30}, //PS5268
17 {1920, 1080, 30}, //SC2310
18 {2048, 1536, 20}, //SC301
19 };
Setup max sensor number.
#define SENSOR_MAX 5
[Description]
SENSOR_MAX: If 4 sensors are used, please set the parameter to 5, because the first column needs to place the dummy data required by FCS.
Fill in sensor pool
1 static const unsigned char sen_id[SENSOR_MAX] = {
2 SENSOR_DUMMY,
3 SENSOR_SC301,
4 SENSOR_GC4653,
5 SENSOR_GC4023,
6 SENSOR_SC2333
7 };
[Description]
sen_id[ ]: Fill the sensors in this array
Setup use sensor.
#define USE_SENSOR SENSOR_SC301
[Description]
USE_SENSOR: Fill the sensor you want to bring up.
Fill in manual IQ list (For manual mode, see example in next section)
1 static const char manual_iq[SENSOR_MAX][64] = {
2 "iq",
3 "iq_sc301_ver20220101",
4 "iq_sc301_ver20230301",
5 "iq_sc301_ver20230601",
6 "iq_sc301_ver20230717",
7 };
[Description]
manual_iq[ ]: Fill in the IQ file name.
Indicate the index of IQ
#define MANUAL_SENSOR_IQ 0x01
[Description]
MANUAL_SENSOR_IQ: The order in “manual_iq”.
How to apply “sensor.h” file to fit to customized usage
One sensor vs. one IQ (auto mode)
Files in “component\soc\8735b\fwlib\rtl8735b\lib\source\ram\video\voe_bin”
sensor_sc301.bin
iq_sc301.bin
fcs_data_sc301.bin
Example
1 #define SENSOR_DUMMY 0x00 //For dummy sensor, no support fast camera start
2 #define SENSOR_SC2336 0x01
3 #define SENSOR_GC2053 0x02
4 // …
5 // …
6 #define SENSOR_PS5268 0x0F
7 #define SENSOR_SC2310 0x10
8 #define SENSOR_SC301 0x11
9
10 static const struct sensor_params_t sensor_params[] = {
11 {1920, 1080, 30}, //DUMMY
12 {1920, 1080, 30}, //SC2336
13 {1920, 1080, 30}, //GC2053
14 // …
15 // …
16 {1920, 1080, 30}, //PS5268
17 {1920, 1080, 30}, //SC2310
18 {2048, 1536, 20}, //SC301
19 };
20
21 #define SENSOR_MAX 5
22
23 static const unsigned char sen_id[SENSOR_MAX] = {
24 SENSOR_DUMMY,
25 SENSOR_SC301,
26 SENSOR_GC4653,
27 SENSOR_GC4023,
28 SENSOR_SC2333
29 };
30
31 #define USE_SENSOR SENSOR_SC301
32
33 static const char manual_iq[SENSOR_MAX][64] = {
34 "iq",
35 "iq_gc2053",
36 "iq_gc4653",
37 "iq_gc4023",
38 "iq_sc2333",
39 };
40
41 #define MANUAL_SENSOR_IQ 0xFF
One sensor vs. multiple IQ (manual mode)
Confirm files in “component\soc\8735b\fwlib\rtl8735b\lib\source\ram\video\voe_bin”
sensor_sc301.bin
iq_sc301_ver20220101.bin
iq_sc301_ver20230717.bin
fcs_data_sc301.bin
Example
1 #define SENSOR_DUMMY 0x00 //For dummy sensor, no support fast camera start
2 #define SENSOR_SC2336 0x01
3 #define SENSOR_GC2053 0x02
4 // …
5 // …
6 #define SENSOR_PS5268 0x0F
7 #define SENSOR_SC2310 0x10
8 #define SENSOR_SC301 0x11
9
10 static const struct sensor_params_t sensor_params[] = {
11 {1920, 1080, 30}, //DUMMY
12 {1920, 1080, 30}, //SC2336
13 {1920, 1080, 30}, //GC2053
14 // …
15 // …
16 {1920, 1080, 30}, //PS5268
17 {1920, 1080, 30}, //SC2310
18 {2048, 1536, 20}, //SC301
19 };
20
21 #define SENSOR_MAX 3
22
23 static const unsigned char sen_id[SENSOR_MAX] = {
24 SENSOR_DUMMY,
25 SENSOR_SC301,
26 SENSOR_SC301
27 };
28
29 #define USE_SENSOR SENSOR_SC301
30
31 static const char manual_iq[SENSOR_MAX][64] = {
32 "iq",
33 "iq_sc301_ver20220101",
34 "iq_sc301_ver20230717",
35 };
36
37 #define MANUAL_SENSOR_IQ 0x01
Multiple sensor vs. multiple IQ
Supposed that we have following complexity set for one project, dual mode for sensor (HDR / Linear), dual lens(1st source / 2nd source) with dual mode (production / manufacture). Here is an example of configuring the sensor.h file.
Index |
Fcs Sensor Bin |
Normal Sensor Bin |
IQ Bin |
|---|---|---|---|
0 |
fcs_data_sensor_linear.bin |
sensor_linear.bin |
iq_sensor_project_1stlens_linear_production |
1 |
fcs_data_sensor_linear.bin |
sensor_linear.bin |
iq_sensor_project_1stlens_linear_manufacture |
2 |
fcs_data_sensor_linear.bin |
sensor_linear.bin |
iq_sensor_project_2ndlens_linear_production |
3 |
fcs_data_sensor_linear.bin |
sensor_linear.bin |
iq_sensor_project_2ndens_linear_manufacture |
4 |
fcs_data_sensor_hdr.bin |
sensor_hdr.bin |
iq_sensor_project_1stlens_hdr_production |
5 |
fcs_data_sensor_hdr.bin |
sensor_hdr.bin |
iq_sensor_project_1stlens_hdr_manufacture |
6 |
fcs_data_sensor_hdr.bin |
sensor_hdr.bin |
iq_sensor_project_2ndlens_hdr_production |
7 |
fcs_data_sensor_hdr.bin |
sensor_hdr.bin |
iq_sensor_project_2ndens_hdr_manufacture |
According to the table, first make sure that the sensor/IQ/FCS files has been placed in the path:component\soc\8735b\fwlib\rtl8735b\lib\source\ram\video\voe_bin
As follows, then we can implement this example through the configuration in sensor.h
1 #define SENSOR_DUMMY 0x00 //For dummy sensor, no support fast camera start
2 #define SENSOR_SC2336 0x01
3 #define SENSOR_GC2053 0x02
4 // …
5 // …
6 #define SENSOR_PS5268 0x0F
7 #define SENSOR_SC2310 0x10
8 #define SENSOR_LINEAR 0x11
9 #define SENSOR_HDR 0x12
10
11 static const struct sensor_params_t sensor_params[] = {
12 {1920, 1080, 30}, //DUMMY
13 {1920, 1080, 30}, //SC2336
14 {1920, 1080, 30}, //GC2053
15 // …
16 // …
17 {1920, 1080, 30}, //PS5268
18 {1920, 1080, 30}, //SC2310
19 {1920, 1080, 30}, //SENSOR_LINEAR
20 {1920, 1080, 20}, //SENSOR_HDR
21 };
22
23 #define SENSOR_MAX 9
24
25 static const unsigned char sen_id[SENSOR_MAX] = {
26 SENSOR_DUMMY,
27 SENSOR_LINEAR,
28 SENSOR_LINEAR,
29 SENSOR_LINEAR,
30 SENSOR_LINEAR,
31 SENSOR_HDR,
32 SENSOR_HDR,
33 SENSOR_HDR,
34 SENSOR_HDR
35 };
36
37 #define USE_SENSOR SENSOR_LINEAR
38
39 static const char manual_iq[SENSOR_MAX][64] = {
40 "iq_dummy",
41 "iq_sensor_project_1stlens_linear_production",
42 "iq_sensor_project_1stlens_linear_manufacture",
43 "iq_sensor_project_2ndlens_linear_production",
44 "iq_sensor_project_2ndens_linear_manufacture",
45 "iq_sensor_project_1stlens_hdr_production",
46 "iq_sensor_project_1stlens_hdr_manufacture",
47 "iq_sensor_project_2ndlens_hdr_production",
48 "iq_sensor_project_2ndens_hdr_manufacture",
49 };
50
51 #define MANUAL_SENSOR_IQ 0x01
Cleanup and Rebuild
After finishing the configuration, please cleanup below path, and rebuild the project to make sure sensor setting take effect.
project\realtek_amebapro2_v0_example\GCC-RELEASE\build
Image Quality
User can bring up sensor with basic image quality on RTK-EVT or user’s DUT. Image Quality will vary based on selected lens and optical structure. For different application, end customer will also have different image quality criteria. Based on each project, user can check subjective and objective image quality criteria or compare with target DUT. For advanced image quality tuning support, user can contact RTK-FAE.
Use UVC Example
AmebaPro2 ISP can support compressed (H264 / H265 / JPG) and uncompressed (NV16 / NV12) image through UVC (wired transmission), and user can check video on pc with Potplayer, Amcap or RTK-realcam. For uncompressed format, user need to install RTK decoder to get video on computer. User can use following flow to build UVC example. Generate the makefile for the UVC project:
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DEXAMPLE=media_uvcd
Then, use the following command to generate an image:
cmake --build . --target flash
Mode switch through IQ configuration
AmebaPro2 ISP use iq bin defined at json file to set image quality parameter. For each iq bin file, it would contain up to 3 iq tables. User can use ISP API to switch. ( isp_set_day_night() for iq table switch, isp_set_gray_mode() for color/gray mode switch) For general usage, suggestion configuration will be defined as follow
Index |
Mode |
IQ Table command |
Color mode command |
|---|---|---|---|
0 |
RGB mode (RGB parameter with color) |
isp_set_day_night(0) |
isp_set_gray_mode(0) |
1 |
IR mode (IR parameter w/o color) |
isp_set_day_night(1) |
isp_set_gray_mode(1) |
2 |
Other mode( like spotlight mode with color or IR mode without IR LED w/o color) |
isp_set_day_night(2) |
User define |
Image Quality Criteria
For first draft image quality version, RTK will provide image quality patch following RTK criteria. User can check table for detailed.
Category |
Condition |
Criteria |
|---|---|---|
Lens Shading |
D65 & CWF & A |
Relative illumination > 80% |
D65 & CWF & A |
R/G [0.9~1.1] |
|
D65 & CWF & A |
B/G [0.9~1.1] |
|
D65 & CWF & A |
B/G [0.9~1.1] |
|
Color Checker |
D65 & CWF & A |
Saturation [100%~120%] |
D65 & CWF & A |
Mean △C ≦10 |
|
D65 & CWF & A |
Max △C ≦ 30 |
|
D65 & CWF & A |
Mean △E ≦20 |
|
D65 & CWF & A |
Max △E ≦ 30 |
|
Auto White Balance |
D65 & CWF & A |
#20~#23 Max △S ≦0.1 |
Resolution (1080P) |
D65 |
Center Horizontal: ≧1000 |
Center Vertical: ≧1000 |
||
Corner Horizontal ≧600 |
||
Corner Vertical ≧600 |
||
Dynamic Range |
D65 |
Max Y ≧ 200 |
Step ≧ 14 |
||
Defect Pixel |
Dark & White |
None |
For advanced image quality such as customized objective image criteria or quality benchmark with target DUT, user can contact with RTK-FAE for tuning support.
OSD2
OSD2 introduction
The text image display consists of hardware maps, drivers and provided Libs. Users use the provided API to create instances, set alphanumeric and image properties, and place alphanumerics or images on streaming images. Users can replace different font files, and then provide enough memory for the OSD to convert alphanumerics into color images according to the font size and text length. The input and output image buffers here need to be physically continuous memory.
Configuration
Display image
Display alphanumeric
Display date and time
Alphanumeric rotation, stroke, transparency
Font library capability;
Supports up to 3 sets of different fonts
Each font group supports up to 1 single-character glyph file and 1 double-character glyph file
Each stream can display up to 24 sets of OSD Block
Note
The starting address of the image Array must be 16Byte align with the Hardware DMA limit
OSD example
OSD example is included in RTSP (-DVIDEO_EXAMPLE=ON) and UVCD (-DEXAMPLE=media_uvcd) examples, and it is located at the path “component\video\osd2\isp_osd_example.c”
Take UVCD for example, before building the firmware, run below command to create the makefile.
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DCUTVER=B -DEXAMPLE=media_uvcd
Execution and testing
Open the ISP AT command in platform_otps.h:
#define CONFIG_ISP 1
Build code and load image.
Connect the USB cable to the AmebaPro2 CON port and the other end to the PC.
Open potplayer, enter atcmd “ATIO=task,0,0,28,56” will show results.
Command parameters:”ATIO=task,0,0(channel),28(char_width),56(char_height)”
OSD Enumerations and Data Structures
In this chapter, we will list OSD API with function parameter introduction.
OSD Data Structures
Data Structures |
Introduction |
|---|---|
<osd_text_info_st> |
Text type OSD parameters. |
<rt_font_st> |
Fonts parameters |
<osd_pict_st> |
Picture type OSD parameters. |
<rt_osd2_info_st> |
OSD parameters. |
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
int |
Channel ID: 0~2 |
<blk_idx> |
int |
Block index: 0~23 |
<font> |
rt_font_st |
Please refers to table of rt_font_st |
<start_x> |
uint32_t |
x-coordinate of start point |
<start_y> |
uint32_t |
y-coordinate of start point |
<rotate> |
uint32_t |
Please refers to enumeration of rt_rotate_t |
<str> |
char * |
String content |
Parameter |
Type |
Introduction |
|---|---|---|
<block_alpha> |
uint8_t |
Transparent value: 0~15. |
<ch_color> |
uint32_t |
Character color in RGB. |
<bg_enable> |
uint8_t |
Enable background: 0~1. |
<bg_color> |
uint32_t |
Background color in RGB. |
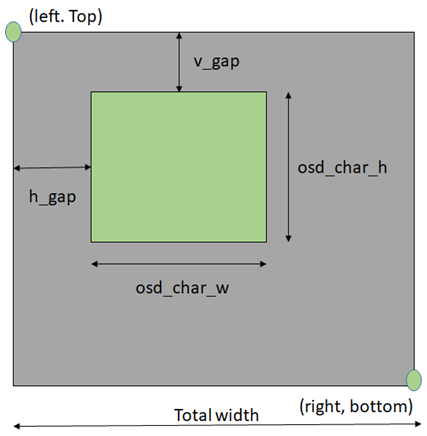
<h_gap> |
uint8_t :4 |
The meaning of the field in the osd structure is shown in below figure. The horizontal interval is h_gap, and the vertical interval is v_gap. |
<v_gap> |
uint8_t :4 |
The meaning of the field in the osd structure is shown in below figure. The horizontal interval is h_gap, and the vertical interval is v_gap. |
<time_fmt> |
rts_osd_time_fmt |
Time format, please refer to introduction of rts_osd_time_fmt |
<date_fmt> |
rts_osd_date_fmt |
Date format, please refer to introduction of rts_osd_date_fmt |
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
int |
Channel ID: 0~2 |
<osd2> |
rt_osd2_info_st |
OSD parameters. |
Parameter |
Type |
Introduction |
|---|---|---|
<blk_idx> |
int |
Block index: 0~23 |
<blk_fmt> |
rts_osd2_blk_fmt |
Block format: Please refers to enumeration rts_osd2_blk_fmt |
<start_x> |
uint32_t |
x-coordinate of start point |
<start_y> |
uint32_t |
y-coordinate of start point |
<end_x> |
uint32_t |
x-coordinate of end point |
<end_y> |
uint32_t |
y-coordinate of end point |
<color_1bpp> |
uint32_t |
Set the RGB color when format is RTS_OSD2_BLK_FMT_1BPP |
<buf> |
uint8_t * |
Image buffer |
<len> |
uint32_t |
Image buffer length |
OSD Enumerations
Enumerations |
Introduction |
|---|---|
<rt_rotate_t> |
Rotation angle, include 0, 90, 180, 270.. |
<rts_osd_time_fmt> |
Time format |
<rts_osd_date_fmt> |
Date format |
<rts_osd2_blk_fmt> |
Block format |
Definition |
Introduction |
|---|---|
<RT_ROTATE_0> |
None rotation |
<RT_ROTATE_90R> |
Rotate 90 degree to the right |
<RT_ROTATE_180R> |
Rotate 180 degree to the right |
<RT_ROTATE_270R> |
Rotate 270 degree to the right |
<RT_ROTATE_90L> |
Rotate 90 degree to the left |
<RT_ROTATE_180L> |
Rotate 180 degree to the left |
<RT_ROTATE_270L> |
Rotate 270 degree to the left |
Definition |
Type |
Introduction |
|---|---|---|
<osd_time_fmt_no> |
Not display time |
Not display time |
<osd_time_fmt_24> |
hh:mm:ss |
14:32:58 |
<osd_time_fmt_12> |
hh:mm:ss |
02:32:58 |
<osd_time_fmt_12_1> |
Phh:mm:ss |
P02:32:58 |
<osd_time_fmt_12_2> |
PMhh:mm:ss |
PM02:32:58 |
<osd_time_fmt_12_3> |
PM~hh:mm:ss |
PM~02:32:58 |
<osd_time_fmt_12_4> |
hh:mm:ssPM |
02:32:58PM |
<osd_time_fmt_12_5> |
hh:mm:ss~PM |
02:32:58~PM |
<osd_time_fmt_12_6> |
hh:mm:ss~~PM |
02:32:58~~PM |
<osd_time_fmt_12_7> |
hh:mm:ss~~~PM |
02:32:58~~~PM |
Definition |
Type |
Example |
|---|---|---|
<osd_date_fmt_no> |
Not display date |
Not display date |
<osd_date_fmt_0> |
dd/MM/yyyy |
26/05/2015 |
<osd_date_fmt_1> |
dd/MM/yy |
26/05/15 |
<osd_date_fmt_2> |
d/M/yy |
26/5/15 |
<osd_date_fmt_3> |
M/d/yyyy |
5/26/2015 |
<osd_date_fmt_4> |
M/d/yy |
5/26/15 |
<osd_date_fmt_5> |
MM/dd/yy |
05/26/15 |
<osd_date_fmt_6> |
MM/dd/yyyy |
05/26/2015 |
<osd_date_fmt_7> |
yyyy/M/d |
2015/5/26 |
<osd_date_fmt_8> |
yyyy-M-d |
2015-5-26 |
<osd_date_fmt_9> |
yyyy-MM-dd |
2015-05-26 |
<osd_date_fmt_10> |
yyyy/MM/dd |
2015/05/26 |
<osd_date_fmt_11> |
yy-MM-dd |
15-05-26 |
<osd_date_fmt_12> |
yy/M/d |
15/5/26 |
<osd_date_fmt_13> |
yy-M-d |
15-5-26 |
<osd_date_fmt_14> |
yy/MM/dd |
15/05/26 |
<osd_date_fmt_15> |
yyyy.mm.dd |
2015.05.26 |
<osd_date_fmt_16> |
dd.mm.yyyy |
26.05.2015 |
<osd_date_fmt_17> |
mm.dd.yyyy |
05.26.2015 |
<osd_date_fmt_18> |
mm-dd-yyyy |
05-26-2015 |
<osd_date_fmt_19> |
dd-mm-yyyy |
26-05-2015 |
<osd_date_fmt_20> |
dd-mm-yyyy www |
26-05-2015 Tue |
<osd_date_fmt_21> |
dd/mm/yyyy www |
26/05/2015 Tue |
<osd_date_fmt_22> |
dd.mm.yyyy www |
26.05.2015 Tue |
Definition |
Introduction |
|---|---|
<RTS_OSD2_BLK_FMT_1BPP> |
Format in 1BPP, pixel size: 1 bit. |
<RTS_OSD2_BLK_FMT_RGBA1111> |
Format in RGBA1111, pixel size: 4 bit. |
<RTS_OSD2_BLK_FMT_RGBA2222> |
Format in RGBA2222, pixel size: 1 byte. |
<RTS_OSD2_BLK_FMT_RGBA5551> |
Format in RGBA5551, pixel size: 2 bytes. |
<RTS_OSD2_BLK_FMT_RGBA4444> |
Format in RGBA4444, pixel size: 2 bytes. |
<RTS_OSD2_BLK_FMT_RGBA8888> |
Format in RGBA8888, pixel size: 4bytes. |
If the block type is rts_osd2_type_date, rts_osd2_type_time or rts_osd2_type_text, block format is always RGBA1111.If the block type is rts_osd2_type_pict, above all block format are supported.
OSD API
rts_osd_init
Initial function is used to create OSD data, font lib and set the time-zone for the indicated stream.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id > |
int |
Stream channel ID. |
<char_resize_w> |
int |
Character size in width. |
<char_resize_h> |
int |
Character size in height. |
<timezone_s> |
int |
Time-zone, unit in seconds. |
<chn_id > |
int |
Stream channel ID. |
rts_osd_deinit
De-initialize the OSD data of indicated stream.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
int |
Stream channel ID. |
rts_osd_set_info
It sets OSD data of indicated stream and block. Each video stream has a separate OSD module. Each OSD module supports up to 24 blocks, a block is an area in the image for displaying characters or images, which represented by the structure “osd_text_info_st” or “osd_pict_st”. English and digital width of a word are inconsistent with Chinese in display. English and array use a single, the width and font files are saved in the single font lib. The Chinese display takes up double width, and the font file is saved in the double wide font lib. For the detail of “osd_text_info_st” and “osd_pict_st”, refer to previous instructions
Note
When using rts_osd_set_info, the parameters “osd_text_info_st” or “osd_pict_st” must be declared as global variables.
Parameter |
Type |
Introduction |
|---|---|---|
<osd_type> |
int |
Types include rts_osd2_type_date, rts_osd2_type_time, rts_osd2_type_pict, rts_osd2_type_text. |
<osd_info> |
void * |
Block detail description, which includes “osd_text_info_st*” and “osd_pict_st*”. “osd_text_info_st*” includes rts_osd2_type_date, rts_osd2_type_time, rts_osd2_type_text “osd_pict_st*” includes rts_osd2_type_pict |
rts_osd_get_timezone
Get the time-zone.
Parameter: None.
rts_osd_set_timezone
Set the time-zone.
Parameter |
Type |
Introduction |
|---|---|---|
<timezone_s> |
int |
The value of time-zone in seconds. |
rts_osd_isp_refresh_datetime
Refresh date-time. All stream use the same date-time information.
Parameter: None.
rts_osd_block_hide
The function used to hide the indicated block.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
int |
Channel ID: 0~2 |
<idx> |
int |
Block index: 0~23 |
rts_osd_block_show
The function used to show the indicated block.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
int |
Channel ID: 0~2 |
<idx> |
int |
Block index: 0~23 |
rts_set_char_size
This function used to change character size dynamically.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
Int |
Stream channel ID. |
<char_resize_w> |
Int |
Character size in width. |
<char_resize_h> |
int |
Character size in height. |
rts_set_font_char_size
This function used to change font lib and character size dynamically.
Parameter |
Type |
Introduction |
|---|---|---|
<chn_id> |
Int |
Stream channel ID. |
<char_resize_w> |
Int |
Character size in width. |
<char_resize_h> |
int |
Character size in height. |
<font_eng> |
void * |
English font lib. |
<font_chi> |
void * |
Chinese font lib. |
rts_osd_task
OSD task function.
Parameter: None.
Note
Please use xTaskCreate to create the task.
osd_update_custom
This function is more suitable when the user only needs to draw only one OSD block.
The prototype is in below path: \component\soc\8735b\fwlib\rtl8735b\lib\source\ram\video\osd\osd_custom.h
Parameter |
Type |
Introduction |
|---|---|---|
<text_info> |
osd_text_info_st * |
Text OSD configuration. |
<p> |
osd_pict_st * |
Picture OSD configuration |
<ready2update> |
BOOL |
Hardware update. |
<fast_start> |
BOOL |
Used for fast start before open streaming. |
<fontlib_idx> |
Int |
Font-lib index/Stream ID |
Note
When using osd_update_custom, the parameters “osd_text_info_st” or “osd_pict_st” must be declared as global variables.
OSD Render Task
For MD and NN examples, we provided an osd_render_task to dynamically render OSD object in real time.
Since OSD objects for the same stream are shared, if users need to run both rts_osd_task and osd_render_task simultaneously, please execute rts_osd_task first. The osd_render_task will automatically avoid any OSD blocks that have already been used.
For the usage of osd_render_task, please first initial OSD objects and font library, and then start the osd_render_task.
//osd render init
int ch_enable[3] = {1, 0, 0};
int char_resize_w[3] = {16, 0, 0}, char_resize_h[3] = {32, 0, 0};
int ch_width[3] = {RTSP_WIDTH, 0, 0}, ch_height[3] = {RTSP_HEIGHT, 0, 0};
osd_render_dev_init(ch_enable, char_resize_w, char_resize_h);
osd_render_task_start(ch_enable, ch_width, ch_height);
When the osd_render_task start properly, user should create a bitmap. After bitmap created, user can use canvas function, such as canvas_set_point, canvas_set_line, canvas_set_rect, canvas_set_text to draw desired object. Then, update the canvas content to the video.
//update osd object
canvas_create_bitmap(ch, idx, RTS_OSD2_BLK_FMT_1BPP);
canvas_set_point(ch, idx, xmin, ymin, point_width, color);
canvas_set_line(ch, idx, xmin, ymin, xmax, ymax, line_width, color);
canvas_set_rect(ch, idx, xmin, ymin, xmax, ymax, line_width, color);
canvas_set_text(ch, idx, xmin, ymin, text_string, color);
canvas_update(ch, idx, 1);
Use the following API to stop the osd_render_task and de-initialize OSD objects and font lib.
//osd render deinit
osd_render_task_stop();
osd_render_dev_deinit_all();
We provided several video examples using OSD render task to show the detection result.
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_md_rtsp_init |
CH1 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> MD |
|
mmf2_video_example_vipnn_rtsp_init |
CH1 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> NN |
|
osd_render_dev_init
Initial function to create OSD data and font lib.
Parameter |
Type |
Introduction |
|---|---|---|
<ch_enable> |
Int* |
Select the video channel that desired to draw OSD object. Channel 0~2 are available to draw. For example, if only want to draw on video channel 0, we will set ch_enable[3] = {1, 0, 0} |
<char_resize_w> |
Int* |
Font width settings for each video channel. The unit is pixel. |
<char_resize_h> |
Int* |
Font height settings for each video channel. The unit is pixel. |
osd_render_dev_deinit
De-initialize OSD object and font lib.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Select the video channel that desired to de-initialize OSD object |
osd_render_dev_deinit_all
De-initialize OSD object and font lib for all video channel.
osd_render_task_start
Start OSD render task.
Parameter |
Type |
Introduction |
|---|---|---|
<ch_visible> |
Int* |
Select the video channel that desired to draw OSD object. Channel 0~2 are available to draw. For example, if only want to draw on video channel 0, we will set ch_visible[3] = {1, 0, 0} |
<ch_width> |
Int* |
The resolution width settings for each video channel. The unit is pixel. |
<ch_height> |
Int* |
The resolution height settings for each video channel. The unit is pixel. |
osd_render_task_stop
Stop OSD render task.
canvas_create_bitmap
Create bitmap for OSD render object.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<bmp_format> |
enum rts_osd2_blk_fmt |
OSD render task only support RTS_OSD2_BLK_FMT_1BPP and RTS_OSD2_BLK_FMT_RGBA2222. RTS_OSD2_BLK_FMT_1BPP use less storage but can only draw one color. RTS_OSD2_BLK_FMT_RGBA2222 can draw 27 colors with 3 transparency settings with more storage usage. |
canvas_update
Update OSD render object. Note that the latest update of OSD object with the same channel id and block id will be shown, so make sure not using the same channel and id for different object.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<ready2update> |
Int |
When ready2update is set to 1, all the OSD block at the same channel will be shown. |
canvas_set_point
Draw point on bitmap.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<x> |
Int |
Point x coordinate value. The unit is pixel. |
<y> |
Int |
Point y coordinate value. The unit is pixel. |
<point_width> |
Int |
Point width. The unit is pixel. |
<color> |
uint32_t |
Point color |
canvas_set_line
Draw line on bitmap.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<xstart > |
Int |
The start point x-coordinate value of the line. The unit is pixel. |
<ystart > |
Int |
The start point y-coordinate value of the line. The unit is pixel. |
<xend> |
Int |
The end point x-coordinate value of the line. The unit is pixel. |
<yend> |
Int |
The end point y-coordinate value of the line. The unit is pixel. |
<line_width> |
Int |
Line width. The unit is pixel. |
<color> |
uint32_t |
Line color |
canvas_set_rect
Draw rect on bitmap.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<xmin> |
Int |
The upper left x-coordinate value of the rectangle. The unit is pixel. |
<ymin> |
Int |
The upper left y-coordinate value of the rectangle. The unit is pixel. |
<xmax> |
Int |
The bottom right x-coordinate value of the rectangle. The unit is pixel. |
<ymax> |
Int |
The bottom right y-coordinate value of the rectangle. The unit is pixel. |
<line_width> |
Int |
Line width. The unit is pixel. When set to -1, the rectangle will be filled. |
<color> |
uint32_t |
Rectangle color |
canvas_set_text
Draw text on bitmap.
Parameter |
Type |
Introduction |
|---|---|---|
<ch> |
Int |
Channel index: 0~2 |
<idx> |
Int |
Block index: 0~23 |
<xmin> |
Int |
The upper left x-coordinate value of the text. The unit is pixel. |
<ymin> |
Int |
The upper left y-coordinate value of the text. The unit is pixel. |
<text_string> |
char * |
Text string |
<color> |
uint32_t |
Text color |
OSD Tools
Font Tool
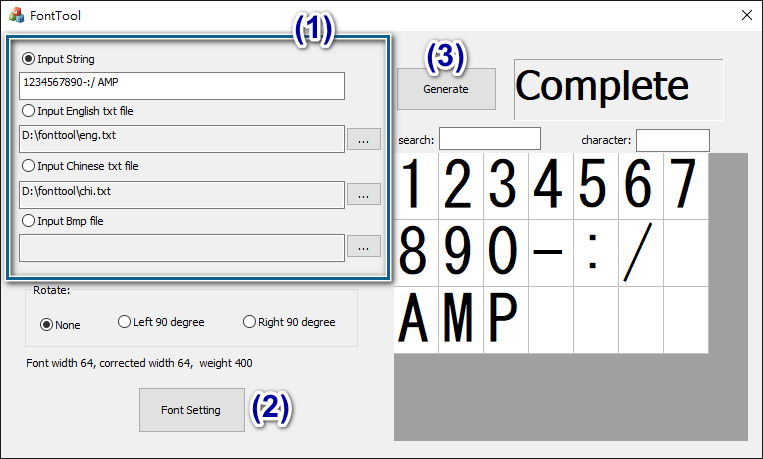
Introduce the numbers in above image
3 options to select the input method: input by strings, English text files, Chinese text files
Please note the option “Input Bmp file” is not used for generating font lib.
Select font: Please avoid the situation when incomplete characters in the preview screen
Generate font-lib: test.bin
[Usage]
Apply test.bin by OSD function: rts_set_font_char_size()
Bitmap Generate Tool
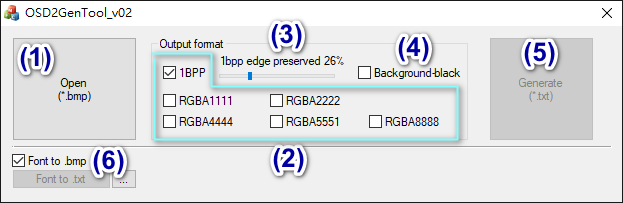
Introduce the numbers in above image
Open the .bmp file.
Select the conversion format.
When you want to output 1BPP(1 bit per pixel) format, the input image should be less gray level, and using black/white as much as possible.
When 1BPP is checked, select the percentage of you want to preserve gray level.
Select the background as black or white
Check: white color maps to foreground; black color maps to background.
Uncheck: white color maps to background; black color maps to foreground.
Generate a text file
Text file is placed in the same path as the input image file.
File content includes information about length, width/height, format and array.
[Usage]
Please reference to the OSD example in the path to update data:
component\video\osd2\isp_osd_example.c
Paste the generated OSD data to the example code, and rename the variables depend on your requirement. For example:
int logo_w = 142;
int logo_h = 66;
enum rts_osd2_blk_fmt logo_fmt = RTS_OSD2_BLK_FMT_1BPP;
int logo_size = 1584;
unsigned char logo_custom[] __attribute__((aligned(32))) = {/*…*/};
Replace the variables in below static functions (emphasized in bold):
osd_pict_st posd2_pic_0;
init_osd_bitmap_pos(&posd2_pic_0, ch, 150, 200, logo_w, logo_h);
init_osd_bitmap_blk(&posd2_pic_0, blk_idx, logo_fmt, 0);
init_osd_bitmap_buf(&posd2_pic_0, logo_custom, logo_size);
(Isolated Function for FontTool) Please note it is an isolated function to transform font-lib to .txt file, and save font-lib characters to .bmp files if “Font to .bmp” is checked. Please follow below steps.
Press “…” to open fon-lib (generated by FontTool).
Check “Font to .bmp” if you also want to save those characters in the font-lib to .bmp.
Press “Font to .txt” to generate .txt and .bmp files from the font-lib.
ISP Control API
In this chapter, we list all ISP control API at application layer. User can use these API to do customized image tuning. For all API, we divide them into 5 category: AE, AWB, image tuning, mode, WDR and dehaze. And we will also show an example to evaluate lens through ISP API.
ISP Control API (AE)
isp_set_exposure_mode
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The mode of exposure, value is 0 or 1. (0: manual, 1: Auto). |
isp_get_exposure_mode
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the mode of exposure, value is 0 or 1. (0: manual, 1: auto) |
isp_set_power_line_freq
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Anti-flicker mode. Range: 0 ~ 3 0: Disable, 1: 50Hz, 2: 60Hz, 3: Auto Remark: 1.Auto mode: (A)Auto mode include flicker detection method, and use 50hz as default configuration to check whether there is flicker. If no-flicker happens, it would keep default configuration. Other, it would use 60 hz. This function will always run when ae enable. 2.50 Hz
3.60 Hz
|
isp_get_power_line_freq
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Anti-flicker mode. Range: 0 ~ 3 0: Disable, 1: 50Hz, 2: 60Hz, 3: Auto Remark:
|
isp_set_exposure_time
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
The exposure time, unit is us. Range is 1~100,000. (Depend on sensor driver) Adjustable precision is +-1. |
isp_get_exposure_time
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Retrieve the exposure time, unit is us. Range is 1~100,000. (Depend on sensor driver) |
isp_set_ae_gain
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Gain value. Range: 256~32768 Adjustable precision: +-1 |
isp_get_ae_gain
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve gain value Range: 256~32768 |
ISP Control API (AWB)
isp_set_awb_ctrl
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Mode of white balance. 0: Manual temperature, 1: Auto. |
Note
The API of manual temperature is not supported.
isp_get_awb_ctrl
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the mode of white balance. 0: Manual, 1: Auto. |
isp_set_wb_temperature
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
white balance temperature Range: 1000~10000. Adjustable precision: +-1 |
isp_get_wb_temperature
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the current white balance temperature |
isp_set_red_balance
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Red balance value based on 256. Range: 256~2047. Adjustable precision: +-1. |
isp_get_red_balance
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the red balance value. |
isp_set_green_balance
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Green balance value based on 256. Range: 256~2047. Adjustable precision: +-1 |
Note
Usually this value is set 256 as default.
isp_get_green_balance
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the green balance value |
isp_set_blue_balance
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Blue balance value based on 256. Range: 256~2047. Adjustable precision: +-1. |
isp_get_blue_balance
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the blue balance value. |
ISP Control API (Image Tuning)
isp_set_brightness
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The brightness value of the image. Range: -64 to 64. Adjustable precision: +-1. |
isp_get_brightness
Parameter |
Type |
Introduction |
|---|---|---|
<pval > |
int * |
Retrieves the current brightness value. Range: -64 to 64. |
isp_set_contrast
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
image contrast value. Range: 0~100. Adjustable precision is +-1. |
isp_get_contrast
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Get the current contrast value. Range: 0~100. |
isp_set_saturation
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
ISP saturation. Range: 0 to 100. Adjustable accuracy: +-1. |
isp_get_saturation
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Get the current saturation. Range: 0 to 100. |
isp_set_gamma
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Gamma coefficient. Range: 100~500. Adjustable precision: +-1. |
isp_get_gamma
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the current Gamma coefficient from 100~500. |
isp_set_sharpness
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
Sharpness of isp Range: 0~100. Adjustable precision: +-1 |
isp_get_sharpness
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the current sharp value from 0 to 100 |
isp_set_denoise_level
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The level of noise reduction. Range: 0~8 Adjustable precision: +-1 |
isp_get_denoise_level
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the level of noise reduction. Range: 0~8 |
ISP Control API (Mode)
isp_set_day_night
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The value of day/night/other mode. 0: day mode, 1: night mode, 2: other |
isp_get_day_night
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of day/night/other mode. 0: day mode, 1: night mode, 2: other |
isp_set_gray_mode
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The value of gray/color mode. 0: color mode, 1: gray mode |
isp_get_gray_mode
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of gray/color mode. 0: color mode , 1: gray mode |
ISP Control API (WDR)
isp_set_wdr_mode
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
WDR mode. Range: 0 ~ 2 0: Disable, 1: Manual, 2: Auto |
isp_get_wdr_mode
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of WDR mode. Range: 0 ~ 2 |
isp_set_wdr_level
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
WDR level. Range: 0~100. Adjustable precision: +-1 |
isp_get_wdr_level
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of WDR level. Range: 0~100. |
ISP Control API (Dehaze)
isp_set_dehaze
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The value of enable/disable mode. 0: disable, 1: enable |
isp_get_dehaze
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of enable/disable mode. 0: disable , 1: enable |
isp_set_dehaze_level
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The level of dehaze. Range: 0~255 Adjustable precision: +-1 |
isp_get_dehaze_level
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the level of dehaze. Range: 0~255 |
ISP Control API (FPS)
isp_set_min_fps
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The value of minimum frame rate. Range: 1 ~ 30 (depend on sensor driver) Adjustable precision: +-1 |
isp_get_min_fps
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of minimum frame rate. Range: 1 ~ 30 (depend on sensor driver) |
isp_set_max_fps
Parameter |
Type |
Introduction |
|---|---|---|
<val> |
int |
The value of maximum frame rate. Range: 1 ~ 30 (depend on sensor driver) Adjustable precision: +-1 |
isp_get_max_fps
Parameter |
Type |
Introduction |
|---|---|---|
<pval> |
Int * |
Retrieve the value of maximum frame rate. Range: 1 ~ 30 (depend on sensor driver) |
Lens evaluation
For lens performance evaluation, user may need to configuration isp. And we have prepared quick start guide.
ISP API |
Description |
Flow |
|---|---|---|
isp_set_exposure_mode |
0: Manual, 1:Auto |
For golden lens, use auto mode to get AE & AWB information. |
isp_set_awb_ctrl |
0: Manual, 1:Auto |
|
isp_get_exposure_time |
Exposure (unit: us) |
|
isp_get_ae_gain |
Gain (unit: 256=1x) |
|
isp_get_red_balance |
Gain (unit: 256=1x) |
|
isp_get_blue_balance |
Gain (unit: 256=1x) |
|
isp_set_exposure_time |
Exposure (unit: us) |
For competitor lens, use manual mode and set AE & AWB information. |
isp_set_ae_gain |
Gain (unit: 256=1x) |
|
isp_set_red_balance |
Gain (unit: 256=1x) |
|
isp_set_blue_balance |
Gain (unit: 256=1x) |
Privacy Mask
Parameters Description
Normal mode
Privacy mask structure in normal mode is private_mask_s, which is defined in video_api.h
The structure is used for setting all mask blocks (include grid and rect mode) at the same time.
typedef struct video_pre_init_params_s {
// …
// …
uint32_t fast_mask_en;
struct private_mask_s {
uint32_t enable;
uint32_t color;
uint32_t en[MASK_MAX_NUM];
uint32_t start_x[MASK_MAX_NUM];//2-align
uint32_t start_y[MASK_MAX_NUM];//2-align
uint32_t w[MASK_MAX_NUM];//16-align when grid-mode
uint32_t h[MASK_MAX_NUM];
uint32_t cols;//8-align
uint32_t rows;
uint8_t bitmap[160];
} fast_mask;
// …
} video_pre_init_params_t;
Parameter description:
.fast_mask_en: Enable privacy mask before booting up.
.fast_mask
.enable: *Not used in normal mode.
.color: mask color. Format is 0xBBGGRR . Note: all blocks(grid/rect mode) use the same color.
.en[MASK_MAX_NUM]: Switch of single mask.
.start_x[MASK_MAX_NUM]: Start point in horizontal. (2-align)
.start_y[MASK_MAX_NUM]: Start point in vertical. (2-align)
.w[MASK_MAX_NUM]: Width. (16-align)
.h[MASK_MAX_NUM]: Height.
.cols: Column number. (8-align)
.rows: Row number.
.bitmap: mask flag, a bit-wise array to control each grid.
FCS mode
For FCS mode, privacy mask structure is video_boot_private_mask_t which is defined in video_boot.h. The structure is the same as normal mode.
The structure is used for setting all mask blocks (include grid and rect mode) at the same time.
typedef struct video_boot_private_mask_s {
uint32_t enable;
uint32_t color;
uint32_t en[PRIVATE_MAX_NUM];
uint32_t start_x[PRIVATE_MAX_NUM];//2-align
uint32_t start_y[PRIVATE_MAX_NUM];//2-align
uint32_t w[PRIVATE_MAX_NUM];//16-align when grid-mode
uint32_t h[PRIVATE_MAX_NUM];
uint32_t cols;//8-align
uint32_t rows;
uint8_t bitmap[160];
} video_boot_private_mask_t;
Parameter description:
.enable: Enable privacy mask before booting up.
.color: mask color. Format is 0xBBGGRR . (Note: all blocks (grid/rect mode) use the same color.)
.en[PRIVATE_MAX_NUM]: Switch of single mask.
.start_x[PRIVATE_MAX_NUM]: Start point in horizontal. (2-align)
.start_y[PRIVATE_MAX_NUM]: Start point in vertical. (2-align)
.w[PRIVATE_MAX_NUM]: Width. (16-align)
.h[PRIVATE_MAX_NUM]: Height.
.cols: Column number. (8-align)
.rows: Row number.
.bitmap: mask flag, a bit-wise array to control each grid.
Enable Privacy Mask Examples
Normal mode
In “example mmf2_video_example_v1_mask_init.c”, it implements grid-mode and rect-mode privacy mask function.
Below steps are required to enable privacy mask.
Step 1. Declare initial structure.
int unit_w = 240;
int unit_h = 135;
video_pre_init_params_t pre_init_param = {
.fast_mask_en = 1,
.fast_mask.en[0] = 1,
.fast_mask.color = 0xff0000, //BBGGRR
.fast_mask.start_x[0] = 0,
.fast_mask.start_y[0] = 0,
.fast_mask.w[0] = 1920, //video_v1_params.width,
.fast_mask.h[0] = 1080, //video_v1_params.height,
.fast_mask.cols = 40, //8 align
.fast_mask.rows = 30,
.fast_mask.en[1] = 1,
.fast_mask.start_x[1] = unit_w,
.fast_mask.start_y[1] = unit_h,
.fast_mask.w[1] = 2 * unit_w,
.fast_mask.h[1] = 2 * unit_h,
.fast_mask.en[2] = 1,
.fast_mask.start_x[2] = 5 * unit_w,
.fast_mask.start_y[2] = 1 * unit_h,
.fast_mask.w[2] = 2 * unit_w,
.fast_mask.h[2] = 2 * unit_h,
.fast_mask.en[3] = 1,
.fast_mask.start_x[3] = 1 * unit_w,
.fast_mask.start_y[3] = 5 * unit_h,
.fast_mask.w[3] = 2 * unit_w,
.fast_mask.h[3] = 2 * unit_h,
.fast_mask.en[4] = 1,
.fast_mask.start_x[4] = 5 * unit_w,
.fast_mask.start_y[4] = 5 * unit_h,
.fast_mask.w[4] = 2 * unit_w,
.fast_mask.h[4] = 2 * unit_h,
};
Step 2. Call initial function before opening stream.
mm_module_ctrl(video_v1_ctx, CMD_VIDEO_PRE_INIT_PARM, (int)&pre_init_param);
FCS mode
Please find the file in below path. \component\video\driver\RTL8735B\video_user_boot.c
Then enable the definition of PRIVATE_TEST.
#define PRIVATE_TEST
The correspondence setting code is implement in user_boot_config_init()
Which is
#ifdef PRIVATE_TEST
video_boot_stream.private_mask.enable = 1;
video_boot_stream.private_mask.color = 0xff0080;
//Rect 0
video_boot_stream.private_mask.en[PRIVATE_MASK_RECT_ID_0] = 1;
video_boot_stream.private_mask.start_x[PRIVATE_MASK_RECT_ID_0] = 0;
video_boot_stream.private_mask.start_y[PRIVATE_MASK_RECT_ID_0] = 0;
video_boot_stream.private_mask.w[PRIVATE_MASK_RECT_ID_0] = 320;
video_boot_stream.private_mask.h[PRIVATE_MASK_RECT_ID_0] = 300;
//Rect 1
video_boot_stream.private_mask.en[PRIVATE_MASK_RECT_ID_1] = 1;
video_boot_stream.private_mask.start_x[PRIVATE_MASK_RECT_ID_1] = 100;
video_boot_stream.private_mask.start_y[PRIVATE_MASK_RECT_ID_1] = 100;
video_boot_stream.private_mask.w[PRIVATE_MASK_RECT_ID_1] = 320;
video_boot_stream.private_mask.h[PRIVATE_MASK_RECT_ID_1] = 300;
//Grid
video_boot_stream.private_mask.en[PRIVATE_MASK_GRID] = 1;
video_boot_stream.private_mask.start_x[PRIVATE_MASK_GRID] = 320;
video_boot_stream.private_mask.start_y[PRIVATE_MASK_GRID] = 300;
video_boot_stream.private_mask.w[PRIVATE_MASK_GRID] = 320;
video_boot_stream.private_mask.h[PRIVATE_MASK_GRID] = 300;
video_boot_stream.private_mask.cols = 8;
video_boot_stream.private_mask.rows = 4;
memset(video_boot_stream.private_mask.bitmap, 0xaa, sizeof(video_boot_stream.private_mask.bitmap));
#endif
Then the privacy mask is applied before FCS boot-up.
Runtime Enable/Disable Privacy Mask
When structure setting is ready, use the API to enable/disable mask on stream.
void video_set_private_mask(int ch, struct private_mask_s *pmask)
Parameter description:
[int ch]: VOE requires an initiation channel to apply the privacy mask. After application, all channels can see the mask results.
[struct private_mask_s *pmask]: mask structure.
External Image Processing
Computing 32x32 luminance information from an RGB or NV12 image and use that information for image processing.
External Image Processing Architecture
External image processing (EIP) architecture is shown in Fig. 15. First, it will confirm whether the value of the automatic exposure (AE) is stable. After stabilization, obtain the statistical brightness value of 32x32 to provide reference for other image processing algorithms, such as motion detection (MD) and auto wide dynamic range (WDR).

Fig. 15 External image processing architecture
Luminance 32x32 Data External Image Processing Architecture
The 32x32 luminance value is calculated by averaging the image. Each value corresponds to the average luminance value for dividing the image into a 32x32 frame. As shown below figure. Calculating motion with 32x32 luminance data has some advantages, such as (1) saving computation time, (2) filtering out noise
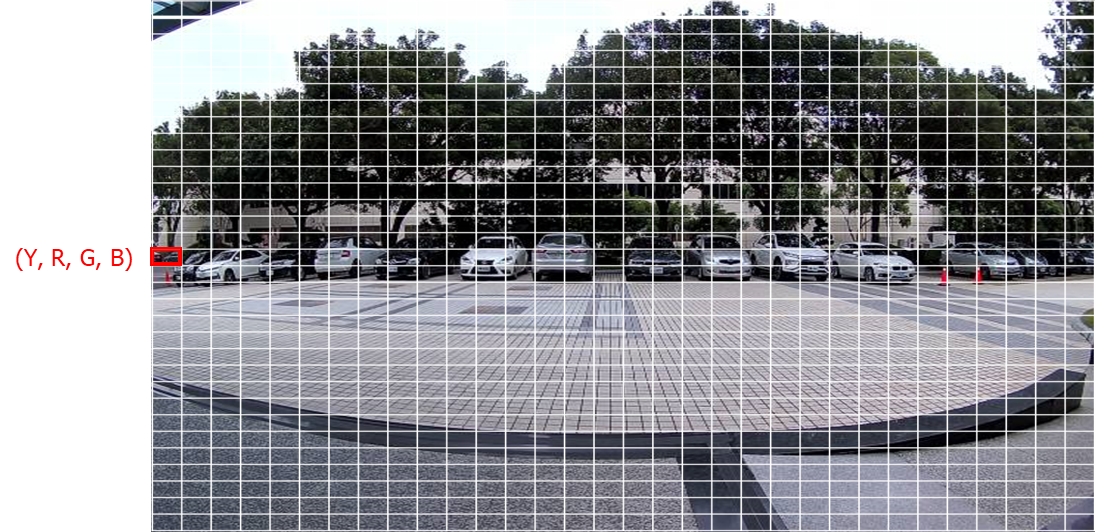
Fig. 16 Average Luminance value for each block are calculated
Motion Detection
Motion detection architecture is shown in Fig. 17. First, we will obtain first 32x32 luminance data to initialize the background model. After initialization, calculate the difference between the luminance values and the background model and the average difference of the entire image. Use the difference information to determine whether to trigger motion detection and update the background model immediately. Please refer to Enable MD ~ MD Set Display Callback Function for detailed instructions for use.
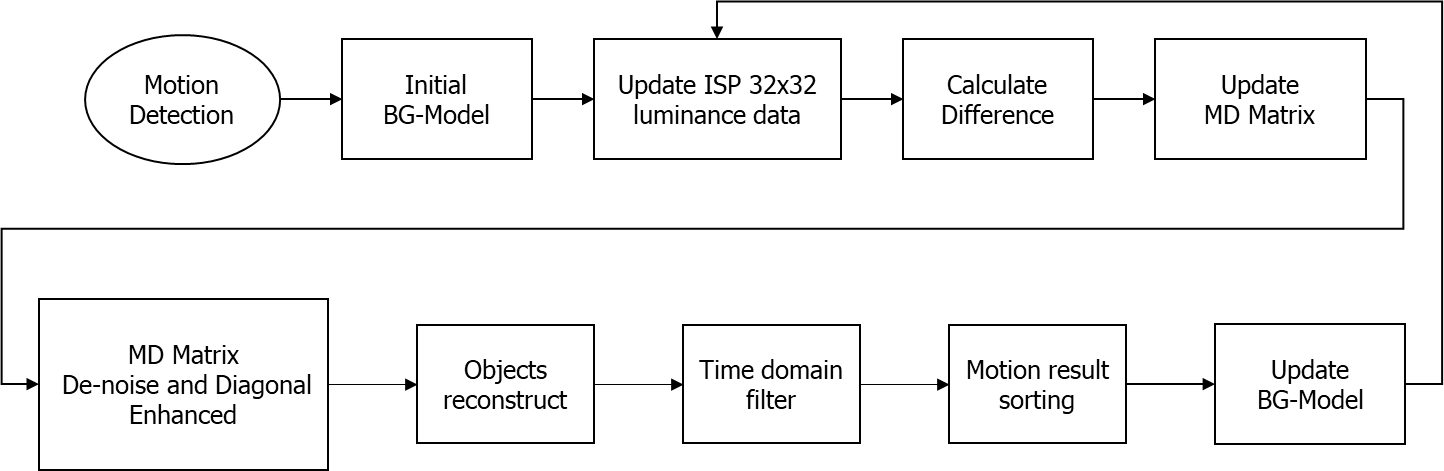
Fig. 17 Motion detection architecture
Background Model
The calculation method of the background model is to calculate the average value of the current luminance value and the recorded background model. This method can preserves background features, improve the sensitivity of motion detection, and update the background model in real time to avoid the problem of false alarm caused by the background change.
Motion Detection Matrix Calculation
The motion information is obtained by calculating the difference and average difference between the luminance value of each frame and the background model. When the luminance value difference is greater than the threshold, motion detection is triggered. The threshold is not a fixed value, but dynamically set with reference to the average difference value of each frame.
Usually the same difference through whole image is caused by noise or light change. By calculating the average difference value of a frame, the area with the difference smaller than the average difference can be filtered out. Take below figure as an example. Initially, all the background value are 1. Motion occurred in the black region, and light change simultaneously. By calculating the average difference change of the whole image, we get average difference of 1.02. After filtering out differences less than 1.02, we get a motion detection matrix that shows where the actual motion occurred, as shown in the black areas as below figure.
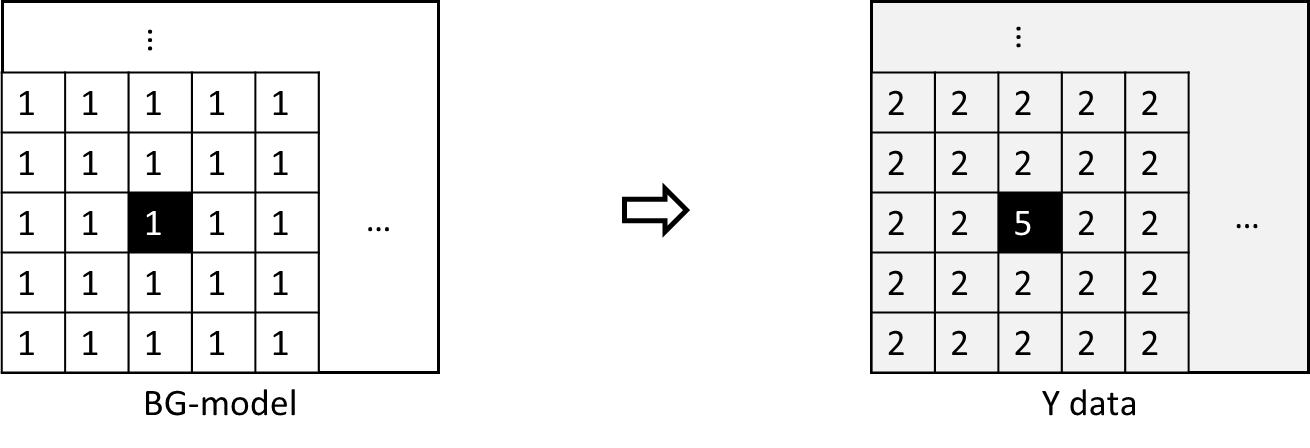
Fig. 18 MD difference calculation
Motion Detection Matrix Post-Processing
After obtaining the motion detection matrix, the matrix will be de-noised and diagonally enhanced. Then, we will reconstruct motion detection matrix into several motion objects. We will filter out motion objects that do not overlap with any motion objects in the last motion result. This removes motion objects that move too fast, such as dust flying. Finally, we will sort the motion detection result according to the area size of the objects.
Motion Detection Example
The MD example is a part of mmf video joined example. Please uncomment the example want to execute. (project/realtek_amebapro2_v0_example/src/mmfv2_video_example/video_example_media_framework.c)
mmf2_video_example_md_rtsp_init();
//mmf2_video_example_md_nn_rtsp_init();
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_md_rtsp_init |
CH1 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> MD |
RTSP video stream over the network. MD detect motion and draw the motion region to RTSP channel. |
mmf2_video_example_md_nn_rtsp_init |
CH1 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> MD -> NN |
RTSP video stream over the network. MD module detect motion. If there is motion detected, it will trigger NN module to detect object and draw the bounding box to RTSP channel. |
mmf2_video_example_md_mp4_init |
CH1 Video -> H264/HEVC -> MP4 CH2 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> MD -> NN |
RTSP video stream over the network. MD module detect motion. If there is motion detected, it will record the motion event. |
Build MD Example
Since it’s a part of video mmf example, user should use the following command to generate the makefile.
Generate the makefile for the MD project:
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DVIDEO_EXAMPLE=ON
Then, use the following command to generate an image:
cmake --build . --target flash
After running the command above, you will get the flash_ntz.bin in “project\realtek_amebapro2_v0_example\GCC-RELEASE\build”. Then, use the image tool to download it to AmebaPro2.
Build MD & NN Example
Since it’s a part of video mmf example, user should use the following command to generate the makefile.
Generate the makefile for the MD project:
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DVIDEO_EXAMPLE=ON
If running mmf2_video_example_md_nn_rtsp_init example, use the following command to generate an image with NN model inside:
cmake --build . --target flash_nn
After running the command above, you will get the flash_ntz.nn.bin in “project\realtek_amebapro2_v0_example\GCC-RELEASE\build”. Then, use the image tool to download it to AmebaPro2.
Validate MD example
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs. Motion detection result will show in logs.
[MD] MD_v12.1
[MD] his params 50, 5
[MD] time filter interval 3
Set MD Mask:
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
…
[VOE]RGB3 320x180 1/10
[VOE]status == 1718
[VOE]release s4 isp buffer 0
[VOE][WARN]useless release s4 slot0 status 0x00000000
[VOE]release s4 isp buffer 1
[VOE][WARN]useless release s4 slot1 status 0x00000000
font resize new size: 4840 byte-w:2 byte-h:32.
font resize new size: 3688 byte-w:4 byte-h:32.
font resize from 32 64 to 16 32.
font resize from 64 64 to 32 32.
font resize:21.
osd_update_custom_init Jun 14 2023
osd ch 0 e1 num 24 (0, 1, 2)
osd_render_task start
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[MD] FPS = 47.53
md initial
[MD] FPS = 10.00
[MD] FPS = 10.00
[MD] FPS = 10.00
If desire to see the motion detected region, set MD_DRAW to 1.
#define MD_DRAW 1
Then, open VLC (or PotPlayer) and create a network stream with URL: rtsp://192.168.x.xx:554
When motion detected, it will draw the motion detected region.
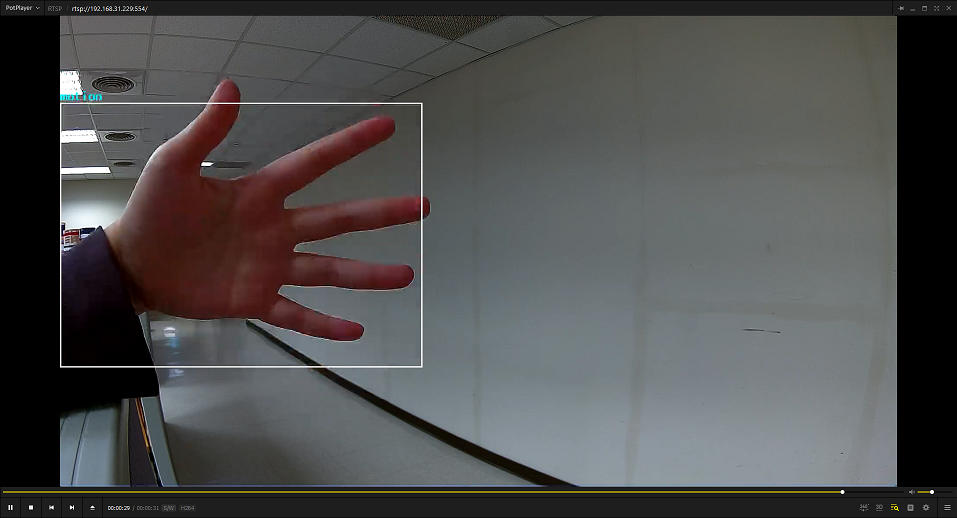
Fig. 19 Motion Detection Example
Note
Motion detection frame rate is fix to 10 FPS. Since the motion detection performance will be effected by frame rate, the actual motion detect frame rate will be shown in every 10 second. Please check if the motion detection frame rate is fix to 10 FPS.
Validate MD & NN example
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs. Motion detection result will show in logs.
[VOE]RGB3 416x416 1/10
[VOE]status == 1718
[VOE]release s4 isp buffer 0
[VOE][WARN]useless release s4 slot0 status 0x00000000
[VOE]release s4 isp buffer 1
[VOE][WARN]useless release s4 slot1 status 0x00000000
siso_md_nn started
font resize new size: 4840 byte-w:2 byte-h:32.
font resize new size: 3688 byte-w:4 byte-h:32.
font resize from 32 64 to 16 32.
font resize from 64 64 to 32 32.
font resize:21.
osd_update_custom_init Mar 29 2023
osd ch 0 e1 num 24 (0, 1, 2)
osd_render_task start
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
AE not sable
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
[VOE]isp_ctrl 0x00980911 id 17
[VOE]isp_ctrl 0x00980913 id 19
md initial
[MD] MD_v10
Motion Detected
YOLOv4t tick[0] = 70
object num = 1
0,c0:1136 299 1374 1060
Motion Detected
YOLOv4t tick[0] = 75
object num = 2
0,c0:1132 299 1369 1060
1,c0:1594 317 1709 1048
Then, open VLC (or PotPlayer) and create a network stream with URL: rtsp://192.168.x.xx:554
When motion detected, it will trigger object detection, and draw the detection result
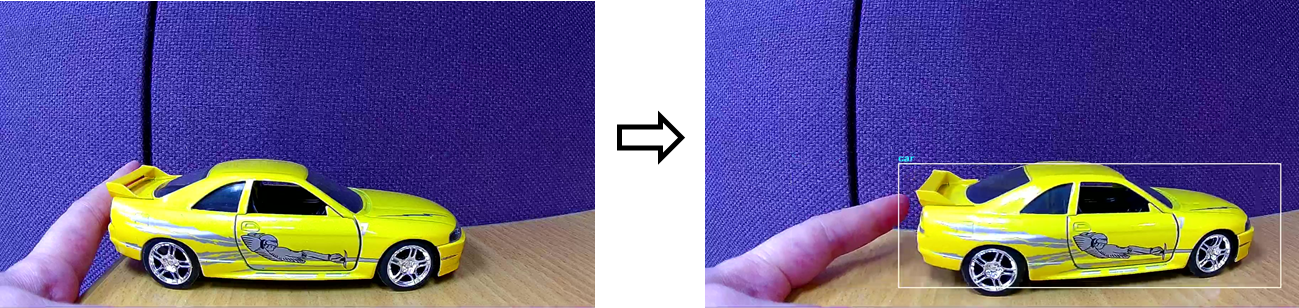
Fig. 20 MD & NN Example
Motion Detection Evaluation
For the motion detection evaluation method, users can determine the motion detection distance through sensitivity and MD configurations settings. However, the performance of motion detection will be affected by the camera placement angle and image distortion. Users should evaluate MD effect in actual application scenarios. The following table shows the MD evaluation results, testing with AmebaPro2 EVB and sensor GC2053 at 1.4 meter height.
Day mode and Night mode should be tested separately. Night mode is more difficult to detect motion. It is recommended to set the MD configuration of night mode to a higher sensitivity. Users can refer to the tested MD day and night mode configuration, as shown in the following code.
static eip_param_t md_param_day = {
.image_width = MD_WIDTH,
.image_height = MD_HEIGHT,
.eip_row = 32,
.eip_col = 32
};
static md_config_t md_config_day = {
.adapt_mode = 0,
.adapt_level = 1.1,
.adapt_step = 30,
.adapt_thr_max = 10,
.bg_mode = 0,
.detect_interval = 1,
.his_resolution = 5,
.his_threshold = 50,
.his_step = 100,
.md_obj_sensitivity = 85,
.md_time_filter_interval = 3,
.md_trigger_block_threshold = 0,
.block_base_thr = 1,
.block_lum_thr = 3,
};
static eip_param_t md_param_night = {
.image_width = MD_WIDTH,
.image_height = MD_HEIGHT,
.eip_row = 32,
.eip_col = 64
};
static md_config_t md_config_night = {
.adapt_mode = 0,
.adapt_level = 1.1,
.adapt_step = 30,
.adapt_thr_max = 10,
.bg_mode = 0,
.detect_interval = 1,
.his_resolution = 6,
.his_threshold = 70,
.his_step = 100,
.md_obj_sensitivity = 95,
.md_time_filter_interval = 3,
.md_trigger_block_threshold = 0,
.block_base_thr = 1,
.block_lum_thr = 3,
};
RGB / IR Mode |
MD Sensitivity |
Moving Ways |
3m |
5m |
7m |
|---|---|---|---|---|---|
Day mode |
76 |
Enter scene |
10/10 |
10/10 |
10/10 |
Night mode |
77 |
Enter scene |
10/10 |
10/10 |
10/10 |
Day mode |
69 |
Enter scene |
10/10 |
10/10 |
0/10 |
Night mode |
67 |
Enter scene |
10/10 |
10/10 |
0/10 |
Day mode |
47 |
Enter scene |
10/10 |
0/10 |
0/10 |
Night mode |
52 |
Enter scene |
10/10 |
0/10 |
0/10 |
Auto Wide Dynamic Range
Auto Wide Dynamic Range (WDR) automatically adjust the WDR level according to luminance statistic information. It can improve the camera’s image quality in high-contrast lighting conditions, allowing both dark and bright areas of the image to be clearly displayed. Please refer to 1.6.4.16 ~ 1.6.4.18 for detailed instructions for use.
EIP Module
The context of the eip module shows as following:
typedef struct eip_ctx_s {
void *parent;
eip_param_t params;
eip_config_t eip_config;
eip_statis_infor_t eip_statis_info;
eip_Y_data_t Y_data;
eip_ae_stable_t ae_stable;
md_config_t md_config;
md_context_t *motion_detect_ctx;
md_result_t md_result;
md_disp_postprcess md_disp_postproc;
unsigned long md_time0;
bool md_out_en;
eip_auto_wdr_t eip_auto_wdr;
int eip_status;
} eip_ctx_t;
Description of parameter in eip_ctx_t:
params: EIP parameters. image resolution settings. Please refer 1.6.4.1 for details.
eip_config: EIP configurations. Set whether to enable each function. Please refer 1.6.4.2 for details.
eip_statis_info: EIP statistic information.
Y_data: luminance 32x32 value.
ae_stable: AE stable settings.
md_config: motion detection configuration. Please refer 1.6.4.8 for details.
motion_detect_ctx: motion detection context.
md_result: motion detection result structure.
md_disp_postproc: call back function to display the MD result
eip_auto_wdr: auto WDR settings.
EIP Set Resolution Parameter
EIP support RGB and NV12 image input. Please modify video type to VIDEO_RGB or VIDEO_NV12. VIDEO_RGB is only available for video channel 4 and VIDEO_NV12 is available for video channel 0~2. User can set EIP parameters by using CMD_EIP_SET_PARAMS. Please first stop eip handle by using CMD_EIP_SET_STATUS, then change the resolution.
#define MD_COL 32
#define MD_ROW 32
#define MD_TYPE VIDEO_RGB //VIDEO_NV12
static video_params_t video_md_params = {
.stream_id = MD_CHANNEL,
.type = MD_TYPE,
.width = MD_WIDTH,
.height = MD_HEIGHT,
// …
};
static eip_param_t md_param = {
.image_width = MD_WIDTH,
.image_height = MD_HEIGHT,
.eip_row = MD_ROW,
.eip_col = MD_COL
};
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
// …
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_STOP);
mm_module_ctrl(md_ctx, CMD_EIP_SET_PARAMS, (int)&md_param);
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_START);
}
image_width: input frame width resolution. Please set to the same width resolution of video channel.
image_height: input frame height resolution. Please set to the same height resolution of video channel.
eip_col: EIP width resolution. Supports setting the value to 32 or 64.
eip_row: EIP height resolution. Supports setting the value to 32.
Accelerated computing is supported for input images with specific resolutions and md resolution 32x32. The input image resolution that supports acceleration are 640x480, 640x360, 576x320, 416x416, 320x180. The CPU utilization of motion detection calculation for different resolution in pure sdk are shows as following. However, the performance of motion detection CPU utilization will be affected if the system is busy.
Input Image Resolution |
MD Resolution |
Video Channel 4 FPS |
CPU Utilization |
|---|---|---|---|
640x480 |
32x32 |
10 |
9% |
640x360 |
32x32 |
10 |
7% |
576x320 |
32x32 |
10 |
8% |
416x416 |
32x32 |
10 |
8% |
320x180 |
32x32 |
10 |
5% |
128x128 |
32x32 |
10 |
4% |
128x128 |
64x32 |
10 |
7% |
EIP Set Configuration
User can set EIP configuration by using CMD_EIP_SET_CONFIG.
static eip_config_t eip_config = {
.en_ae_stable = 1,
.en_md = 0,
.en_auto_wdr = 0,
};
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
// …
mm_module_ctrl(md_ctx, CMD_EIP_SET_CONFIG, (int)&eip_config);
}
en_ae_stable: check if auto explosion is stable, before obtain luminance value. set 0: disable , 1: enable.
en_md: motion detection. set 0: disable , 1: enable.
en_auto_wdr: auto wide dynamic range. set 0: disable , 1: enable.
EIP Get Configuration
User can get EIP configuration by using CMD_EIP_GET_CONFIG:
eip_config_t eip_config;
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
// …
mm_module_ctrl(md_ctx, CMD_EIP_GET_CONFIG, (int)&eip_config);
}
EIP Set Status
User can set EIP status by using CMD_EIP_SET_STATUS:
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_STOP);
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_START);
}
EIP status should set to stop before modify parameters and configurations.
EIP Show Configuration
User can set EIP status by using CMD_EIP_SHOW_CONFIG:
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SHOW_CONFIG,1);
}
EIP parameters and configuration will be displayed as the following log.
[EIP] 640x480 -> 32x32
[EIP] ae stable 1
[MD] MD_v13.1
[MD] thr 1.0, 3.0
[MD] bg_mode 0
[MD] his params 50, 5, 200
[MD] time filter interval 3
[MD] sen 90, 5, 5
[AutoWDR] AutoWDR_v1.1
< 0< 16< 32< 48< 64< 80< 96<112<128<144<160<176<192<208<224<240
0 38 95 52 42 51 83 94 116 122 110 79 91 51 0 0
[AutoWDR] wdr_level=70 sat_level=5 status=3, wdr_weight=301
Enable AE Stable
User can enable wait for automatic exposure (AE) is stabilize by using CMD_EIP_AE_STABLE_EN. Set 1 to enable, and set 0 to disable.
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_AE_STABLE_EN,1);
}
Enable MD
User can enable motion detection by using CMD_EIP_SET_MD_EN. Set 1 to enable, and set 0 to disable.
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_MD_EN,1);
}
MD Set Configuration
User can set MD configurations by using CMD_MD_SET_MD_CONFIG. Please first stop eip handle by using CMD_EIP_SET_STATUS, then change the MD configurations.
md_config_t md_config = {
.adapt_mode = 0, //default close adapt mode
.adapt_level = 1.1,
.adapt_step = 30,
.adapt_thr_max = 10,
.bg_mode = 0, //normal background update
.detect_interval = 1, //detect every frame
.his_resolution = 5,
.his_threshold = 50,
.his_step = 200,
.md_obj_sensitivity = 90,
.md_time_filter_interval = 3, //filter fast motion that cannot be tract in 3 frames
.md_trigger_block_threshold = 0, //default trigger if any motion detct
.block_base_thr = 1,
.block_lum_thr = 3,
};
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_STOP);
mm_module_ctrl(md_ctx, CMD_EIP_SET_MD_CONFIG, (int)&md_config);
mm_module_ctrl(md_ctx, CMD_EIP_SET_STATUS, EIP_STATUS_START);
}
adapt_mode: adaptive mode. Adaptive mode will be replaced with histogram setting, so it is off by default. Set 0: disable adaptive mode, 1: normal adaptive mode, 2: raising adaptive mode. When adaptive mode is enable, the block difference threshold will gradually increase.
adapt_level: adapt level. The target adaptative threshold will be set to “adapt_level” times the current difference.
adapt_step: adapt step frames. Need “adapt_step” frames to reach the target adaptive threshold.
adapt_thr_max: maximum adaptive threshold.
his_threshold: background histogram filter threshold. It should be set between 40 to70. When the frequency of the color of the motion trigger block exceeds the background histogram threshold, it will be filtered as a dynamic background. Normally used for filtering fan and leaves shaving.
his_resolution: background histogram resolution settings. Only support to set 4 or 5. The value can only be set before running. With the higher resolution, motion detection will be more sensitivity to color change.
his_step: background histogram resolution maximum step. It should be set between 100 and 200 frames. This means that each background block will be memorized for n frames.
bg_mode: background update mode. Set 0: normal update mode, 1: de-noise update mode.
detect_interval: detect every n frames.
md_time_filter_interval: motion detection time filter interval. The value should be set to 3~5. Fast motion that cannot be tracked within n frames will be filtered out with this setting.
md_trigger_block_threshold: motion blocks threshold settings to trigger cascaded NN module.
block_base_thr: motion blocks base threshold. The smaller the value, the higher the sensitivity
block_lum_thr: motion blocks luminance threshold. The smaller value, the higher sensitive to light change.
md_mask: motion detection mask array. set 0: disable MD, 1: enable MD
md_obj_sensitivity: motion detection sensitivity settings.
MD Get Configuration
User can get EIP configuration by using CMD_EIP_GET_MD_CONFIG:
md_config_t md_config;
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_GET_MD_CONFIG, (int)&md_config);
}
MD Set Sensitivity
User can set MD sensitivity value by using CMD_EIP_SET_MD_SENSITIVITY:
int md_sensitivity_value = 80;
md_ctx = mm_module_open(&md_module);
if (md_ctx) {
// …
mm_module_ctrl(md_ctx, CMD_EIP_SET_MD_SENSITIVITY, md_sensitivity_value);
}
The sensitivity of motion detection can be set in the range of 0~100. Each sensitivity value corresponding to md trigger block count, as shown in below table. It can detect small movements when the sensitivity is set to a larger value.
RTK sensitivity |
Trigger Block Count |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|
100-91 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
3 |
4 |
90-81 |
5 |
5 |
6 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
80-71 |
13 |
14 |
16 |
17 |
18 |
20 |
21 |
23 |
24 |
26 |
70-61 |
27 |
29 |
31 |
32 |
34 |
36 |
38 |
40 |
42 |
44 |
60-51 |
46 |
48 |
50 |
53 |
55 |
57 |
60 |
62 |
65 |
67 |
50-41 |
70 |
72 |
75 |
78 |
81 |
83 |
86 |
89 |
92 |
95 |
40-31 |
98 |
101 |
104 |
108 |
111 |
114 |
118 |
121 |
124 |
128 |
30-21 |
131 |
135 |
139 |
142 |
146 |
150 |
154 |
158 |
162 |
166 |
20-11 |
170 |
174 |
178 |
182 |
186 |
191 |
195 |
199 |
204 |
208 |
10-1 |
213 |
217 |
222 |
227 |
231 |
236 |
241 |
246 |
251 |
256 |
RTK sensitivity |
Trigger Block Count |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|
100-91 |
4 |
4 |
4 |
4 |
4 |
4 |
4 |
4 |
6 |
8 |
90-81 |
10 |
10 |
12 |
12 |
14 |
16 |
18 |
20 |
22 |
24 |
80-71 |
26 |
28 |
32 |
34 |
36 |
40 |
42 |
46 |
48 |
52 |
70-61 |
54 |
58 |
62 |
64 |
68 |
72 |
76 |
80 |
84 |
88 |
60-51 |
92 |
96 |
100 |
106 |
110 |
114 |
120 |
124 |
130 |
134 |
50-41 |
140 |
144 |
150 |
156 |
162 |
166 |
172 |
178 |
184 |
190 |
40-31 |
196 |
202 |
208 |
216 |
222 |
228 |
236 |
242 |
248 |
256 |
30-21 |
262 |
270 |
278 |
284 |
292 |
300 |
308 |
316 |
324 |
332 |
20-11 |
340 |
348 |
356 |
364 |
372 |
382 |
390 |
398 |
408 |
416 |
10-1 |
426 |
434 |
444 |
454 |
462 |
472 |
482 |
492 |
502 |
512 |
MD Get Sensitivity
User can get MD sensitivity value by using CMD_EIP_GET_MD_SENSITIVITY:
int md_sensitivity_value;
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_GET_MD_SENSITIVITY, (int)&md_sensitivity_value);
}
MD Set Mask
User can disable motion detect in desired region by setting motion detection mask array. Setting 0 to disable MD, 1 to enable MD.
Take care lane image as an example. If we want to filter out the car motion when far from camera, we can disable MD in the upper part of the image, as shown in below figure.
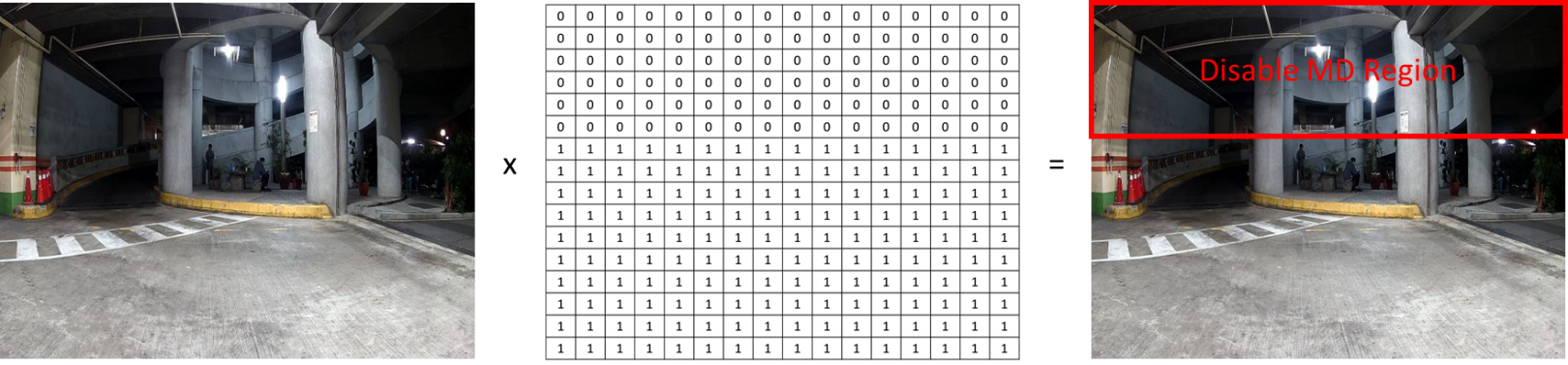
Fig. 21 MD Mask
User can set MD mask value by using CMD_MD_SET_MD_MASK.
char md_mask [MD_MASK_ROW * MD_MASK_COL] = {0};
for (int i = 0; i < MD_MASK_ROW * MD_MASK_COL; i++) {
md_mask[i] = 1;
}
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_MD_MASK, (int)&md_mask);
}
MD Get Mask
User can get MD mask value by using CMD_MD_GET_MD_MASK:
char md_mask [MD_COL * MD_ROW];
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_GET_MD_MASK, (int)&md_mask);
}
MD Get Result
The context of the motion detection result structure shows as following:
typedef struct md_pos_s {
float xmin, ymin, xmax, ymax;
} md_pos_t;
typedef struct md_result_s {
int motion_cnt;
md_pos_t md_pos[MD_MAX_GOBJ];
int event_cnt;
} md_result_t;
motion_cnt: number of motion detection objects.
md_pos: motion detected object position.
event_cnt: number of motion detection events in one second.
User can get MD result value by using CMD_EIP_GET_MD_RESULT. It will return a motion detection result structure.
md_result_t res;
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_GET_MD_RESULT, (int)&res);
for (int i = 0; i < res.count; i++) {
int xmin = (int)(res.md_pos[i].xmin * RTSP_WIDTH);
int ymin = (int)(res.md_pos[i].ymin * RTSP_HEIGHT);
int xmax = (int)(res.md_pos[i].xmax * RTSP_WIDTH);
int ymax = (int)(res.md_pos[i].ymax * RTSP_HEIGHT);
printf("%d: x(%d,%d), y(%d,%d)\r\n", i, xmin, xmax, ymin, ymax);
}
}
MD Set Display Callback Function
User can register a call back function to display the MD result. Use CMD_EIP_SET_MD_DISPPOST to set up callback function for display the MD result:
static void md_process(void *md_result)
{
md_result_t *md_res = (md_result_t *) md_result;
/* Process or display the result here */
}
if (md_ctx) {
// …
mm_module_ctrl(md_ctx, CMD_EIP_SET_MD_DISPPOST, (int)md_process);
}
Enable Auto WDR
User can enable motion detection by using CMD_EIP_SET_AUTO_WDR_EN. Set 1 to enable, and set 0 to disable.
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_AUTO_WDR_EN,1);
}
Auto WDR Set Configuration
User can set auto WDR configurations by using CMD_MD_SET_MD_CONFIG:
eip_auto_wdr_config_t eip_auto_wdr_config = {
.wdr_weight_thr1 = 240,
.wdr_weight_thr2 = 160,
.wdr_weight_thr3 = 60,
.wdr_max_level = 70,
.wdr_min_level = 50,
.wdr_duration = 3000,
};
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_SET_AUTO_WDR_CONFIG, (int)&eip_auto_wdr_config);
}
wdr_weight_thr1: auto WDR threshold 1. When the auto WDR weighting higher than threshold1, raise the WDR level.
wdr_weight_thr2: auto WDR threshold 2. When the auto WDR weighting higher than threshold2, raise the WDR level.
wdr_weight_thr3: auto WDR threshold 3. When the auto WDR weighting higher than threshold3 and lower than threshold2, remain the WDR level. If WDR weighting lower than threshold3, than lower the WDR level.
wdr_max_level: the maximum WDR level.
wdr_min_level: the minimum WDR level.
wdr_duration: WDR update duration. The unit is microseconds. Should be set to 1 second or more.
Auto WDR Get Configuration
User can get auto WDR configurations by using CMD_EIP_GET_AUTO_WDR_CONFIG:
eip_auto_wdr_config_t eip_auto_wdr_config;
md_ctx = mm_module_open(&eip_module);
if (md_ctx) {
mm_module_ctrl(md_ctx, CMD_EIP_GET_AUTO_WDR_CONFIG, (int)&eip_auto_wdr_config);
}
Meta Data
This function can insert additional relevant information into each frame. Currently contains relevant ISP statistics, UUID and USER DATA parts.
Enable the Meta data
It can reference the below setup procedure to enable the Meta data. The detail procedure can reference the below setup, the example is at the mmfv2_video_example_v1_sanpshot_init.c. It needs to enable the META data before open the video streaming because it is global parameters. Every channel setup is independent so you can decide which channel need to open the feature.
#if defined(ENABLE_META_INFO)
unsigned char uuid[16] = {0xc7, 0x98, 0x2c, 0x28, 0x0a, 0xfc, 0x49, 0xe6, 0xaa, 0xe4, 0x7f, 0x8f, 0x64, 0xee, 0x65, 0x01};
video_pre_init_params_t init_params;
memset(&init_params, 0x00, sizeof(video_pre_init_params_t));//Clean the parameters.
init_params.meta_enable = 1;//Enable the meta data
init_params.meta_size = VIDEO_META_USER_SIZE;//Setup the Meta User size that it include the UUID
memcpy(init_params.video_meta_uuid, uuid, VIDEO_META_UUID_SIZE);//Setup the UUID
video_pre_init_setup_parameters(&init_params);//Call the initial function
video_v1_params.meta_enable = 1;//Enable the meta for the channel 1
#endif
#if defined(ENABLE_META_INFO)
mm_module_ctrl(video_v1_ctx, CMD_VIDEO_META_CB, (int)video_meta_cb);//It need to use the callback to insert the meta data
#endif
About the callback function
#if defined(ENABLE_META_INFO)
static void video_meta_cb(void *parm)
{
video_meta_t *m_parm = (video_meta_t *)parm;
m_parm->user_buf = meta_user_buf;//Assign your buffer to here
m_parm->user_buf_len = sizeof(meta_user_buf);//Fill the length
video_sei_write(m_parm);//It will write the meta data to your frame.
}
#endif
About the fcs mode, it need to setup the below and the other procedure is the same as the normal mode.
#ifdef META_DATA_TEST
video_boot_stream.meta_enable = 1;
video_boot_stream.meta_size = VIDEO_BOOT_META_USER_SIZE;
#endif
The meta data layout is below
[ISP][UUID][USER_DATA]
ISP contain as the below
typedef struct {
int exposure_h;
int gain_h;
int exposure_l;
int gain_l;
int wb_r_gain;
int wb_b_gain;
int wb_g_gain;
int colot_temperature;
int y_average;
uint32_t white_num;
uint32_t rg_sum;
uint32_t bg_sum;
int hdr_mode;
int sensor_fps;
int max_fps;
int frame_count;
u32 time_stamp;
uint32_t wdr_hist_contrast;
uint32_t wdr_hist_contrast_origin;
uint32_t reserved;
} isp_statis_meta_t;
typedef struct {
int max_width;
int max_height;
int out_width;
int out_height;
int crop_x;
int crop_y;
int crop_width;
int crop_height;
int frame_count;
u16 skip_m;
u16 skip_n;
} isp_meta_t;
// UUID contains, as below that it is 16 bytes unique data//Define by customer
unsigned char uuid[16] = {0xc7, 0x98, 0x2c, 0x28, 0x0a, 0xfc, 0x49, 0xe6, 0xaa, 0xe4, 0x7f, 0x8f, 0x64, 0xee, 0x65, 0x01};
Decode the Meta Information
The decode function is
void video_sei_read (unsigned char /*…*/);
For details of video_sei_read, please refers to \component\video\driver\RTL8735B\video_api.c.
Implementation: (Step 1~4)
Step 1. Please port video_sei_read, structures, and related macro from SDK to your development platform.
Step 2. In order to find the meta-data, please search the UUID in the stream.
UUID is defined as: (for reference only)
unsigned char uuid[16] = {0xc7, 0x98, 0x2c, 0x28, 0x0a, 0xfc, 0x49, 0xe6, 0xaa, 0xe4, 0x7f, 0x8f, 0x64, 0xee, 0x65, 0x01};
Note: UUID is a customized unique ID with 16 bytes length. Please request the number from your firmware provider.
Step 3. Once the UUID is found, please copy the stream data to your working buffer, starting from the top of the UUID, and length is:
int iLength = VIDEO_META_UUID_SIZE + sizeof(isp_statis_meta_t) + sizeof(isp_meta_t) + VIDEO_META_USER_SIZE.
Step 4. After the working buffer is ready, set the buffer to video_sei_read(unsigned char …).
For ease of understanding, please refer to the example below
unsigned char aucUUID[16];
unsigned *pucBuf = malloc(iLength);
isp_statis_meta_t statis_meta;
isp_meta_t meta;
video_sei_read(uuid, pucBuf, &statis_meta, &meta, usr_data, VIDEO_META_USER_SIZE);
free(m_pucBuf);
In the above example, m_pucBuf is the input buffer and the others are output.
After calling the function video_sei_read, meta-info in the frame is decoded into static_meta, meta, and usr_data.
IQ Driver Guide
This section provides guides for sensor driver development and porting on AmebaPro2.
IQ Tuning Guide
This section provides comprehensive guides for ISP/IQ tuning and calibration.
- Tuning Guide CHT
- Tuning Guide ENG
- UVC FW Compiled for IQ Tuning CHT
- UVC FW Compiled for IQ Tuning ENG
- Introduction for FPS setting
- Introduction for Encoder Configuration
- Calibration flow for Fcs mode
- RTK IQ Validation Training
- IQ Manual Calibration
- [AmebaPro2] Introduction for Switch flow(Day / Night mode)
- Introduction for Quick guide with ISP debug information
- AmebaPro2_FastCameraStart_AE_AWB_Flow
- [AmebaPro2] Meta Analyzer Tool User Manual
- FCS Time Measure