NN
AmebaPro2 has an NN HW engine(NPU) to accelerate the neural network inference process. NN models obtained from different AI framework, such as Keras, Tensorflow, Tensorflow Lite, PyTorch, Caffe, ONNX, Darknet and etc, can be converted to network binary graph file and be deployed on AmebaPro2 easily.
NN module
The NN mmf module – vipnn is provided to process the input RGB frame from video module, and do NN inference. Then, NN inference result will be stored in network output tensor. Since the output tensor format of each model are different, vipnn module will also do the post-process work for the NN output tensor to extract the information and convert to understandable message. The pre-process and post-process function can also be registered with their customized model.
VIPNN module
The context of the video module shows as following:
typedef struct vipnn_ctx_s {
void *parent;
vip_network network;
vip_buffer_create_params_t vip_param_in[MAX_IO_NUM];
vip_buffer_create_params_t vip_param_out[MAX_IO_NUM];
vip_buffer input_buffers[MAX_IO_NUM];
vip_buffer output_buffers[MAX_IO_NUM];
vipnn_params_t params;
vipnn_status_t status;
char network_name[64];
int input_count;
int output_count;
vipnn_preproc_t pre_process;
vipnn_postproc_t post_process;
disp_postprcess_t disp_postproc;
vipnn_cascaded_mode_t cas_mode;
bool module_out_en;
vipnn_measure_t measure;
} vipnn_ctx_t;
Description of parameter in vipnn_ctx_t:
network: an opaque handle to the new network object if the request is executed successfully.
vip_param_in: parameter of network input tensor.
vip_param_out: parameter of network output tensor.
input_buffers: buffer for model input tensor.
output_buffers: buffer for model output tensor.
params: basic parameters for the vipnn module.
status: record status of vipnn module.
network_name: nn network name.
input_count: the number of input tensor in the NN network.
output_count: the number of output tensor in the NN network.
pre_process: pre-process function for processing the data before passing to NN inference.
post_process: post-process function for decoding the data from NN inference.
disp_postproc: Set the callback function for display the NN result on video frame. It could be set by using CMD_VIPNN_SET_DISPPOST.
module_out_en: enable module output.
measure: time measurement
Basic vipnn module parameters setting
Here are some vipnn module parameters provided to set.
typedef struct vipnn_param_s {
int model_type;
char model_file[64];
uint8_t *model_mem;
uint32_t model_size;
int fps;
int in_width, in_height;
rect_t roi;
int m_width, m_height; // should read from model, not user setting
nn_data_param_t *in_param;
nnmodel_t *model;
} vipnn_params_t;
// …
nn_data_param_t in_param = {
.img = {
.width = NN_WIDTH,
.height = NN_HEIGHT,
.rgb = 0,
.roi = {
.xmin = 0,
.ymin = 0,
.xmax = NN_WIDTH,
.ymax = NN_HEIGHT,
}
},
.codec_type = AV_CODEC_ID_RGB888
};
Use CMD_VIPNN_SET_IN_PARAMS to set up the NN input parameters.
img.width: input frame width.
img.height: input frame height.
img.rgb: reserved, do not care.
img.roi: ROI of input frame. Usually, we set it to (0,0,NN_WIDTH, NN_HEIGHT).
codec_type: model input type, could be AV_CODEC_ID_RGB888, AV_CODEC_ID_NV12, AV_CODEC_ID_NN_RAW.
Note
Model input codec type should be matched with media source output codec type.
Set NN model to vipnn module
Use CMD_VIPNN_SET_MODEL to set up the NN model:
vipnn_ctx = mm_module_open(&vipnn_module);
if (vipnn_ctx) {
// …
mm_module_ctrl(vipnn_ctx, CMD_VIPNN_SET_MODEL, (int)&yolov4_tiny);
// …
}
Set NN result display callback function
User can register a call back function to so display the NN result or do their own customized additional post-processing. Use CMD_VIPNN_SET_DISPPOST to set up callback function for display the NN result:
static void nn_result_display (void *p, void *img_param)
{
objdetect_res_t *res = (objdetect_res_t *)p;
nn_data_param_t *im = (nn_data_param_t *)img_param;
/* Process or display the result here */
}
// …
// …
vipnn_ctx = mm_module_open(&vipnn_module);
if (vipnn_ctx) {
// …
mm_module_ctrl(vipnn_ctx, CMD_VIPNN_SET_DISPPOST, (int)nn_result_display);
// …
}
Set NN object/face detection threshold
There are two threshold values related to NN post-processing result – confidence & NMS threshold.
Confidence is the score of the bounding box. Use CMD_VIPNN_SET_SCORE_THRES to set up confidence score threshold:
static float nn_confidence_thresh = 0.5;
mm_module_ctrl(vipnn_ctx, CMD_VIPNN_SET_CONFIDENCE_THRES, (int)&nn_confidence_thresh);
For the same class, if the IOU (Intersection over union) of two bounding box larger then NMS threshold, these two objects will be considered the same object. Use CMD_VIPNN_SET_NMS_THRES to set up NMS threshold:
static float nn_nms_thresh = 0.3;
mm_module_ctrl(vipnn_ctx, CMD_VIPNN_SET_NMS_THRES, (int)&nn_nms_thresh);
Model Zoo
Currently, the SDK provides several deployed models. They are listed in following table:
Table Pro2 model list
Category |
Model |
Description |
|---|---|---|
Object detection |
Yolov3-tiny
Yolov4-tiny
Yolov7-tiny
|
|
Object detection |
NanoDet-Plus |
|
Face detection |
SCRFD |
https://github.com/deepinsight/insightface/tree/master/detection/scrfd |
Face Recognition |
MobileFaceNet |
https://github.com/deepinsight/insightface/tree/master/recognition |
Sound classification |
YAMNet |
https://github.com/tensorflow/models/tree/master/research/audioset/yamnet |
Object detection model
SDK provides object detection model for user to evaluate – Yolov3-tiny, Yolov4-tiny and Yolov7-tiny.
Yolo series model
YOLO (you only look once) is a neural network algorithm for object detection, implemented with darknet architecture. Yolo is well-known for its lightweight, less dependent and efficient in algorithms.
For more information, see Yolo’s Github maintain by its authors: https://github.com/AlexeyAB/darknet
Face detection model
Currently, the SDK provide a face detection model for user to evaluate – SCRFD.
SCRFD
SCRFD(Sample and Computation Redistribution for Efficient Face Detection) is an efficient high accuracy face detection approach.
For more information, see InsightFace official Github: https://github.com/deepinsight/insightface/tree/master/detection/scrfd
Face Recognition model
SDK provide a face recognition model for user to evaluate – MobileFaceNet(ArcFace).
MobileFaceNet with ArcFace
MobileFaceNet is a face recognition model trained with ArcFace (Additive Angular Margin Loss).
For more information, see InsightFace official Github: https://github.com/deepinsight/insightface/tree/master/recognition
Sound classification model
A pre-trained sound classification model is provided in SDK – YAMNet.
YAMNet
YAMNet is a model that can predicts 521 audio event classes based on the AudioSet.
For more information, see TensorFlow official Github:
https://github.com/tensorflow/models/tree/master/research/audioset/yamnet
yamnet_fp16: official model used to predict 521 sounds
yamnet_s: RTK self-trained model to predict 2 alarm sounds — CO, Smoke
NN result format
After NN model inference, the inference result will be store in NN output tensor. These output tensors should be decoded in post-processing.
vipnn_res_t structure is used to store the post-processing result:
typedef struct vipnn_res_s {
union {
objdetect_res_t od_res; // for object detection
facedetect_res_t fd_res; // for face detection
face_feature_res_t frec_res; // for face recognition
};
int type;
} vipnn_res_t;
Object detection
For the object detection result, the post-processing will parse the object position and probability from the output tensor, and fill the results to an objdetect_res_t structure:
#define MAX_DETECT_OBJ_NUM 128
typedef struct objdetect_res_s {
int obj_num;
union {
float result[MAX_DETECT_OBJ_NUM * 6];
detobj_t res[MAX_DETECT_OBJ_NUM];
};
} objdetect_res_t;
Description of parameter in objdetect_res_t:
obj_num: indicate the number of object detected in current frame.
result: record the class_index, probability and bounding box position for each object as format in following figure.
c: class_index
p: probability
tx, ty, bx, by: bounding box(top_x, top_y, bottom_x, bottom_y)

Fig. 9 object detection format
Face detection
For the face detection result, the post-processing will parse the face position, score and landmarks from the output tensor, and fill the results to facedetect_res_t structure:
typedef struct facedetect_res_s {
int obj_num;
union {
float result[MAX_DETECT_OBJ_NUM * 6];
detobj_t res[MAX_DETECT_OBJ_NUM];
};
landmark_t landmark[MAX_DETECT_OBJ_NUM];
} facedetect_res_t;
Face recognition
For the face recognition result, the post-processing will decode the face feature, and fill the results to face_feature_res_t structure:
#define MAX_FACE_FEATURE_DIM 128
typedef struct face_feature_res_s {
float result[MAX_FACE_FEATURE_DIM];
} face_feature_res_t;
NN model preparation (Acuity)
NN model should be prepared before using the NN example
Using existing NN model in SDK
There are several existing NN model binary files provided in SDK:
yolov3_tiny.nb (416x416), yolov4_tiny.nb (416x416), yolov7_tiny.nb (416x416), yolov4_tiny_576x320.nb
yamnet_fp16.nb, yamnet_s.nb
scrfd_500m_bnkps_576x320_u8.nb, scrfd_500m_bnkps_640x640_u8.nb
mobilefacenet_int8.nb (112x112), mobilefacenet_int16.nb (112x112)
They are located in “project/realtek_amebapro2_v0_example/src/test_model”.
Note
In face recognition application, it would be better to remain the image aspect ratio to get a better accuracy. If user want to run object detection and face detection/recognition at the same time, we can choose scrfd_500m_bnkps_576x320_u8.nb and yolov4_tiny_576x320.nb.
Offline AI Model Conversion Methods
Users can use the offline Acuity Toolkit to convert their customized trained model
Acuity Toolkit (supported on Linux OS only)
Note
To access offline AI model conversion tools, please fill up this Form with your official company, institution, or educational organization email account. This will help to verify your application and process your inquiry more efficiently. Once approved, please sign in to your GitHub account to download the files.
Acuity Toolkit download
NN memory evaluation
This section shows how to evaluate NN model size and DDR usage. The following table shows the memory information of existing model provided in SDK:
Table Model memory and size
Category |
Model |
Input size |
Quantized |
DDR memory |
File size |
|---|---|---|---|---|---|
Object detection |
Yolov3-tiny
Yolov4-tiny
Yolov4-tiny
Yolov7-tiny
NanoDet-Plus-m
NanoDet-Plus-m
|
416x416
416x416
576x320
416x416
416x416
576x320
|
uint8
uint8
uint8
uint8
uint8
uint8
|
6.9 MB (6,946,128 bytes)|
7.7 MB (7,712,412 bytes)|
7.48 MB (7,840,836 bytes)
8.2 MB (8,597,072 bytes)
4.33 MB (4,542,016 bytes)
4.53 MB (4,746,556 bytes)
|
5.6 MB (5,568,384 bytes)
4.1 MB (4,131,712 bytes)
3.85 MB (4,043,136 bytes)
4.44 MB (4,664,512 bytes)
1.86 MB (1,959,040 bytes)
1.83 MB (1,924,096 bytes)
|
Face detection |
SCRFD
SCRFD
|
640x640
576x320
|
uint8
uint8
|
4.1 MB (4,291,200 bytes)
2.6 MB (2,753,864 bytes)
|
0.68 MB (715,584 bytes)
0.56 MB (583,232 bytes)
|
Face Recognition |
MobileFaceNet
MobileFaceNet
|
112x112
112x112
|
int8
int16
|
1.72 MB (1,799,716 bytes)
5.1 MB (5,343,948 bytes)
|
0.86 MB (904,576 bytes)
3.42MB (3,590,656 bytes)
|
Sound classification |
YAMNet
YAMNet_s
|
15600x1
96x64
|
fp16
hybrid
|
9.2 MB (9,172,348 bytes)
0.73 MB (729,608 bytes)
|
8.7 MB (8,669,888 bytes)
0.67 MB (678,336 bytes)
|
Evaluate memory usage of model
Please refer the above table to evaluate the ddr memory usage of the model. Take yolov4-tiny for example, it requires at least 8MB ddr memory. Therefore, we have to make sure the NN ddr region in link script is enough for this model.
Check and modify in “project\realtek_amebapro2_v0_example\GCC-RELEASE\application\rtl8735b_ram.ld
/* DDR memory */
VOE (rwx) : ORIGIN = 0x70000000, LENGTH = 0x70100000 - 0x70000000 /* 1MB */
DDR (rwx) : ORIGIN = 0x70100000, LENGTH = 0x73000000 - 0x70100000 /* 49MB */
NN (rwx) : ORIGIN = 0x73000000, LENGTH = 0x74000000 - 0x73000000 /* 16MB */
Note
Please also modify project/realtek_amebapro2_v0_example/GCC-RELEASE/bootloader/rtl8735b_boot_mp.ld to make the NN ddr region be consistent with rtl8735b_ram.ld. In addition, if building a TrustZone project, rtl8735b_ram_ns.ld should be modified instead of rtl8735b_ram.ld.
Evaluate model size
Please make sure the NN region in partition table is larger than your model size, so that the model can be downloaded to flash correctly.
Take yolov4-tiny for example, the model size is about 4MB

Fig. 10 model network binary
The nn region length in “project\realtek_amebapro2_v0_example\GCC-RELEASE\mp\amebapro2_partitiontable.json” should not less than 4MB
"nn":{
"start_addr" : "0x770000",
"length" : "0x700000",
"type": "PT_NN_MDL",
"valid": true
},
Using the NN MMF example with VIPNN module
The NN example is a part of mmf video joined example. Please uncomment the example want to execute.
(project/realtek_amebapro2_v0_example/src/mmfv2_video_example/video_example_media_framework.c)
mmf2_video_example_vipnn_rtsp_init();
//mmf2_video_example_vipnn_facedet_init();
//mmf2_video_example_face_rtsp_init();
//mmf2_video_example_joint_test_all_nn_rtsp_init();
//mmf2_video_example_joint_test_vipnn_rtsp_mp4_init;
//mmf2_video_example_audio_vipnn_init();
Current supported VIP NN examples
Table NN examples
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_vipnn_rtsp_init |
Video (H264/H265)-> RTSP (V1) Video (RGB) -> NN (V4) |
|
mmf2_video_example_md_nn_rtsp_init |
Video (H264/H265) -> RTSP (V1) Video (RGB) -> MD (V4)-> NN |
|
mmf2_video_example_vipnn_facedet_init |
Video (H264/H265) -> RTSP (V1) Video (RGB) -> NN face detect (V4) |
|
mmf2_video_example_face_rtsp_init |
Video (H264/H265) -> RTSP (V1) Video (RGB) -> NN face detect (V4) -> NN face recognition |
|
mmf2_video_example_joint_test_all_nn_rtsp_init |
Video (H264/H265) -> RTSP (V1) RGB -> NN object detect (V4) RGB -> NN face detect (V4) -> NN face recognition AUDIO -> NN audio classification |
NN do audio classification. |
mmf2_video_example_joint_test_vipnn_rtsp_mp4_init |
H264 -> MP4 (V1) Video (H264/H265) -> RTSP (V2) RGB -> NN object detect (V4) RGB -> NN face detect (V4) -> NN face recognition (optional) AUDIO -> AAC -> RTSP and mp4 RTP -> AAD -> AUDIO AUDIO -> NN audio classification |
NN do audio classification. |
mmf2_video_example_audio_vipnn_init.c |
AUDIO -> NN |
The sound received by AmebaPro2 can be transmitted to NN engine to do sound classification. |
Set RGB video resolution as model input size
If setting the RGB resolution according to NN model input tensor shape, it can avoid image resizing and save pre-processing time.
For example, if you are using yolov4-tiny with input size 416x416, you should set NN_WIDTH and NN_HEIGHT to 416 in video_v4_params.
#define YOLO_MODEL 1
#define USE_NN_MODEL YOLO_MODEL
// …
#if (USE_NN_MODEL==YOLO_MODEL)
#define NN_WIDTH 416
#define NN_HEIGHT 416
static float nn_confidence_thresh = 0.4;
static float nn_nms_thresh = 0.3;
#else
#error Please set model correctly. (YOLO_MODEL)
#endif
// …
static video_params_t video_v4_params = {
.stream_id = NN_CHANNEL,
.type = NN_TYPE,
.resolution = NN_RESOLUTION,
.width = NN_WIDTH,
.height = NN_HEIGHT,
.bps = NN_BPS,
.fps = NN_FPS,
.gop = NN_GOP,
.direct_output = 0,
.use_static_addr = 1
};
Note
Please always check the NN model input size and set RGB video output size according to it. Otherwise, software image resizing will be used in pre-process, and it will cost a lot of CPU usage.
Set RGB video output as resized or cropped
The RGB video parameter can be adjust and make RGB output a resized image or cropped image.
Output cropped RGB:
static video_params_t video_v4_params = {
.stream_id = NN_CHANNEL,
.type = NN_TYPE,
.resolution = NN_RESOLUTION,
.width = NN_WIDTH,
.height = NN_HEIGHT,
.bps = NN_BPS,
.fps = NN_FPS,
.gop = NN_GOP,
.direct_output = 0,
.use_static_addr = 1
};
Output resized RGB (1920 x 1080 NN_WIDTH x NN_HEIGHT):
static video_params_t video_v4_params = {
.stream_id = NN_CHANNEL,
.type = NN_TYPE,
.resolution = NN_RESOLUTION,
.width = NN_WIDTH,
.height = NN_HEIGHT,
.bps = NN_BPS,
.fps = NN_FPS,
.gop = NN_GOP,
.direct_output = 0,
.use_static_addr = 1,
.use_roi = 1,
.roi = {
.xmin = 0,
.ymin = 0,
.xmax = 1920, //SENSOR MAX WIDTH
.ymax = 1080, //SENSOR MAX HEIGHT
}
};
Choose NN model
{
"msg_level":3,
"PROFILE":["FWFS"],
"FWFS":{
"files":[
"MODEL0",
"MODEL2"
]
},
"MODEL0":{
"name" : "yolov4_tiny.nb",
"source":"binary",
"file":"yolov4_tiny.nb"
},
"MODEL1":{
"name" : "yamnet_fp16.nb",
"source":"binary",
"file":"yamnet_fp16.nb"
},
"MODEL2":{
"name" : "yamnet_s.nb",
"source":"binary",
"file":"yamnet_s.nb"
},
"MODEL3":{
"name" : "mobilefacenet_int16.nb",
"source":"binary",
"file":"mobilefacenet_int16.nb"
}
}
Note
After choosing the model, user have to check the ddr memory and flash size usage of models. Please refer 1.5.1 and 1.5.2 to do evaluation.
Build NN example
Since it’s a part of video mmf example, user should use the following command to generate the makefile.
Generate the makefile for the NN project:
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DVIDEO_EXAMPLE=ON
Then, use the following command to generate an image with NN model inside:
cmake --build . --target flash_nn
After running the command above, you will get the flash_ntz.nn.bin (including the model) in “project\realtek_amebapro2_v0_example\GCC-RELEASE\build”
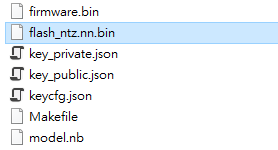
Fig. 11 image with NN model
Then, use the image tool to download it to AmebaPro2.
Update NN model on flash
If user just want to update the NN model instead of updating whole firmware, the following command can be used to update NN section on flash partially:
Nand flash
$ .\uartfwburn.exe -p COM? -f .\flash_ntz.nn.bin -b 3000000 -n pro2 -t 0x81cf
Validate NN example
Refer the following section to validate nn examples.
Object detection example
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs
…
[VOE]RGB3 640x480 1/5
[VOE]Start Mem Used ISP/ENC: 0 KB/ 0 KB Free= 701
hal_rtl_sys_get_clk 2
GCChipRev data = 8020
GCChipDate data = 20190925
queue 20121bd8 queue mutex 71691380
npu gck vip_drv_init, video memory heap base: 0x71B00000, size: 0x01300000
yuv in 0x714cee00
[VOE][process_rgb_yonly_irq][371]Errrgb ddr frame count overflow : int_status 0x00000008 buf_status 0x00000010 time 15573511 cnt 0
input 0 dim 416 416 3 1, data format=2, quant_format=2, scale=0.003660, zero_point=0
ouput 0 dim 13 13 255 1, data format=2, scale=0.092055, zero_point=216
ouput 1 dim 26 26 255 1, data format=2, scale=0.093103, zero_point=216
---------------------------------
input count 1, output count 2
input param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.003660, zero_point=0
sizes 1a0 1a0 3 1 0 0
output param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.092055, zero_point=216
sizes d d ff 1 0 0
output param 1
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.093103, zero_point=216
sizes 1a 1a ff 1 0 0
---------------------------------
in 0, size 416 416
VIPNN opened
siso_array_vipnn started
nn tick[0] = 47
object num = 0
nn tick[0] = 46
object num = 0
…
Then, open VLC and create a network stream with URL: rtsp://192.168.x.xx:554
If everything works fine, you should see the object detection result on VLC player.
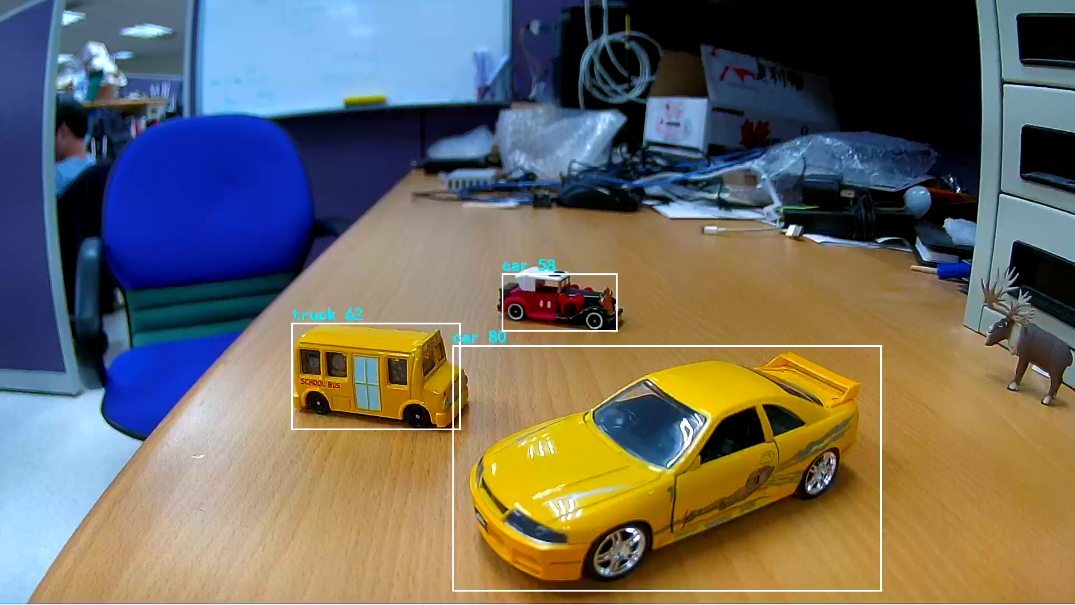
Fig. 12 VLC validation
Face detection example
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs
…
[VOE]RGB3 640x480 1/10
[VOE]zoom default setting
[VOE]status == 1718
[VOE]release s4 isp buffer 0
[VOE]release s4 isp buffer 1
hal_rtl_sys_get_clk 0
GCChipRev data = 8020
GCChipDate data = 20190925
queue 20129598 queue mutex 71c17500
npu gck vip_drv_init, video memory heap base: 0x72800000, size: 0x01800000
NN IRQ default priority : 0, set to 9
---------------------------------
input count 1, output count 4
input param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=1.000000, zero_point=0
sizes 280 1e0 3 1 0 0
output param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.003550, zero_point=0
sizes a0 78 1 1 0 0
output param 1
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.019616, zero_point=0
sizes a0 78 2 1 0 0
output param 2
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.004289, zero_point=130
sizes a0 78 2 1 0 0
output param 3
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.004716, zero_point=1
sizes a0 78 a 1 0 0
---------------------------------
VIPNN opened
siso_video_vipnn started
NN OSD Draw start
nn_rect_ch:0, nn_rect_txt_w:16, nn_rect_txt_h:32.
font resize new size: 4768.
font resize new size: 3688.
font resize from 32 64 to 16 32.
font resize from 64 64 to 32 32.
font resize:22.
object num = 1
0,c0:928 333 1235 700
object num = 1
0,c0:942 325 1237 691
object num = 1
0,c0:944 332 1234 684
object num = 1
0,c0:933 332 1229 684
object num = 1
0,c0:930 332 1232 684
…
Then, open VLC and create a network stream with URL: rtsp://192.168.x.xx:554
If everything works fine, you should see the face detection result on VLC player.

Fig. 13 face detection VLC validation (COCO 2017)
Face recognition example
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs
…
[VOE]RGB3 640x480 1/10
[VOE]zoom default setting
[VOE]status == 1718
[VOE]release s4 isp buffer 0
[VOE]release s4 isp buffer 1
hal_rtl_sys_get_clk 0
GCChipRev data = 8020
GCChipDate data = 20190925
queue 20129d78 queue mutex 71c19aa0
npu gck vip_drv_init, video memory heap base: 0x72800000, size: 0x01800000
NN IRQ default priority : 0, set to 9
Init 1 Queue elements
---------------------------------
input count 1, output count 4
input param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=1.000000, zero_point=0
sizes 280 1e0 3 1 0 0
output param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.003550, zero_point=0
sizes a0 78 1 1 0 0
output param 1
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.019616, zero_point=0
sizes a0 78 2 1 0 0
output param 2
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.004289, zero_point=130
sizes a0 78 2 1 0 0
output param 3
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.004716, zero_point=1
sizes a0 78 a 1 0 0
---------------------------------
VIPNN opened
Init 1 Queue elements
---------------------------------
input count 1, output count 1
input param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 0
quant_data , none-quant
sizes 70 70 3 1 0 0
output param 0
data_format 5
memory_type 0
num_of_dims 2
quant_format 1
quant_data , dfp=13
sizes 80 1 0 0 0 0
---------------------------------
VIPNN2 opened
FACERECOG opened
siso_facenet_facerecog started
siso_facedet_facenet started
siso_array_vipnn started
NN OSD Draw start
nn_rect_ch:0, nn_rect_txt_w:16, nn_rect_txt_h:32.
font resize new size: 4768.
font resize new size: 3688.
font resize from 32 64 to 16 32.
font resize from 64 64 to 32 32.
font resize:22.
update ROI 408 0 531 92
center 437,20 rotate -5.042451
--------> no data
object num = 0
update ROI 406 0 533 95
center 433,23 rotate -5.194429
--------> no data
object num = 0
update ROI 410 0 529 94
center 435,25 rotate -6.115504
--------> no data
…
User can use console command to register their face with person ID.
Let camera shooting your face and run the following command to register your face:
FREG=My_Name
Then, your ID will be registered and please open VLC to check the result
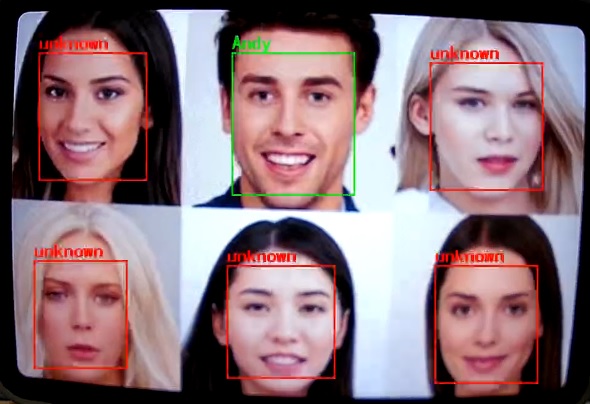
Fig. 14 face recognition VLC validation (AI generated faces)
You can also register other person with their ID
FREG=Person_ID_1
…
FREG=Person_ID_2
…
FREG=Person_ID_3
…
If you want to clear and reset all registered person ID, run following command to reset:
FRFR
If you want to save the registered face feature to flash, please run
FRFS
After saving the features to flash, you can load the registered face feature from flash after system reboot
FRFL
Audio classification example
If everything works fine, you should see the following logs
…
Deploy YAMNET_S
fci part tbl start 10
fci part tbl dup cnt 8
update page size 2048 page per block 64
type_name NN_MDL, file_name yamnet_s.nb
open: part_rec 7043d6a0, part_recs_cnt 1, type_id 81cf
file yamnet_s.nb, len 678336
network 70431540
input 0 dim 1 64 96 1, data format=1, quant_format=0, none-quant
ouput 0 dim 3 1 0 0, data format=1, none-quant
---------------------------------
input count 1, output count 1
input param 0
data_format 1
memory_type 0
num_of_dims 4
quant_format 0
quant_data , none-quant
sizes 1 40 60 1 0 0
output param 0
data_format 1
memory_type 0
num_of_dims 2
quant_format 0
quant_data , none-quant
sizes 3 1 0 0 0 0
---------------------------------
in 0, size 1 64
VIPNN opened
siso_audio_vipnn started
YAMNET_S tick[0] = 2
class 1, prob 1.00
YAMNET_S tick[0] = 2
class 1, prob 1.00
YAMNET_S tick[0] = 1
class 1, prob 1.00
YAMNET_S tick[0] = 1
class 1, prob 1.00
YAMNET_S tick[0] = 1
class 1, prob 1.00
…
User can use audio sample to validate the result. Use CO & smoke audio smaple in https://research.google.com/audioset/dataset/smoke_detector_smoke_alarm.html to verify the result.
YAMNet_s can recognize 3 audio classes:
class 0: CO
class 1: Others
class 2: Smoke