Multimedia Framework Architecture
The Multimedia Framework Architecture is responsible for handling the connection and management of different media resources on AmebaPro2.
Architecture
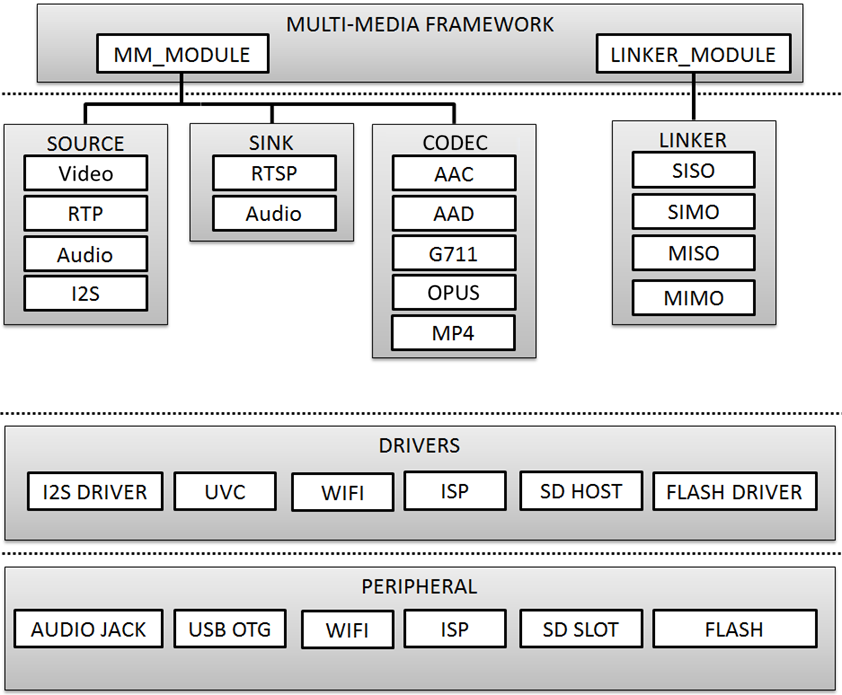
The structure of MMF is as shown in the following chart and there are two important entities in the MMF, MM_MODULE and LINKER_MODULE:
MM_MODULE includes the media source, sink and the codec modules.
Source module: produce resource, it can be the file input, microphone, camera, or storage.
Codec module: mainly provide the audio codec, AAC, G711 or opus for customers to do audio encode or decode before sending streaming to sink module. In the mp4 module, it will automatically send the result into storage, SD card or ram disk.
Sink module: consume resource from the source modules or after encoded/decoded by codec modules, like RTSP or other steaming.
Note
The video modules uses VOE to contain the process of sensor catching, ISP and video encoding algorithms (jpeg, H264, HEVC (H265)…).
LINKER_MODULE connect different type of module and deal with inter module communication, included siso, simo, miso and mimo.
In order to use the MMF, here are some aspects must to be followed.
Define valid source
Define valid sink
Define valid codec (encode/decode) if needed.
Define valid linker modules to link the above media modules.
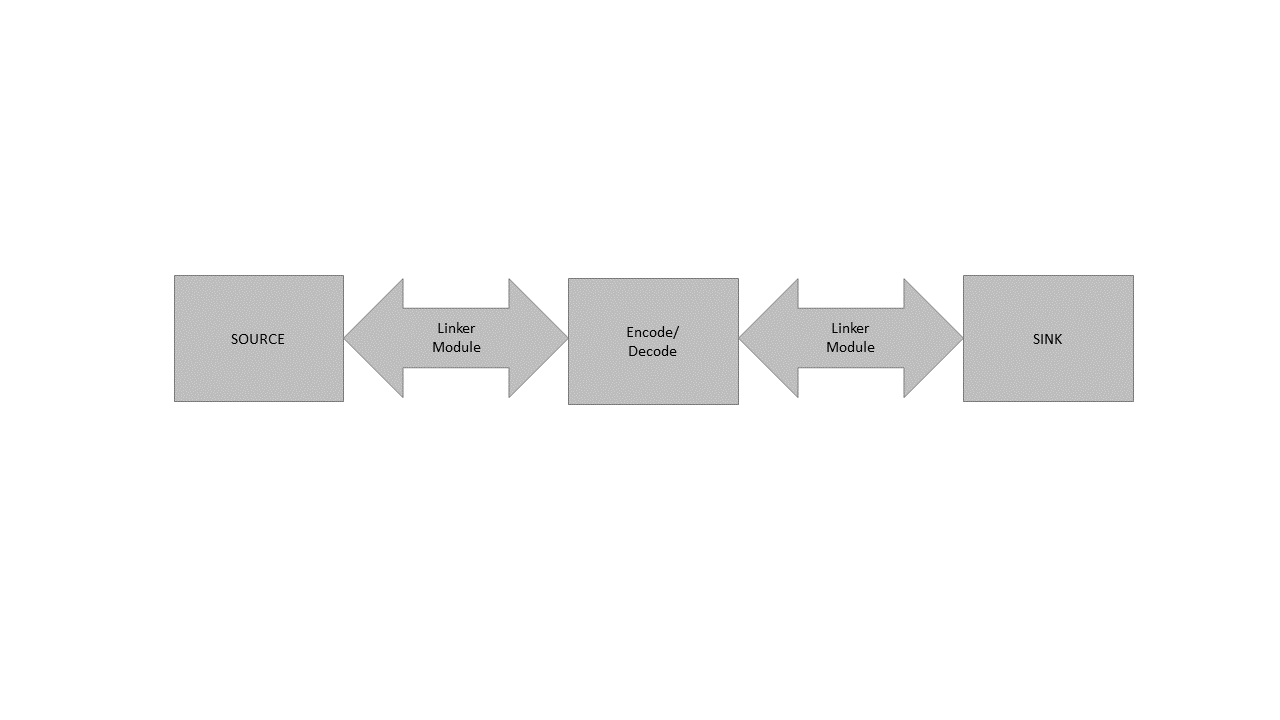
The following picture shows the main usage flow to initialize different MM_MODULE, and connect different MM_MODULE through LINKER_MODULE.
MM_Module Prototype
MMF allows users to define customized source, sink and encoder/decoder modules depending on the application. Although implementation details may be different, basic rules of the MMF structure are similar.
The MMF requires users to predefine both source and sink modules through implementing create, destroy, control, handle, new_item, del_item and rsz_item function callbacks. The structure mmf_module_t provides the interface for communication between mmf modules. In order to maintain the flexibility and convenience between modules, modules only retain the interface of each type to provide module to access. Function’s constant of each module is defined by module itself.
typedef struct mm_module_s {
void* (*create)(void *);
void* (*destroy)(void *);
int (*control)(void *, int, int);
int (*handle)(void *, void *, void *);
void* (*new_item)(void *);
void* (*del_item)(void *, void *);
void* (*rsz_item)(void *, void *, int);
void* (*vrelease_item)(void *, void *, int);
uint32_t output_type;
uint32_t module_type;
char * name;
} mm_module_t;
Function description
create
Pointer to the function that loads and initializes the module that you wish to add. For example, for Audio source, it points to the function in which the Audio driver is initialized and the corresponding context is returned.
destroy
Pointer to the function that de-initializes module instance and releases resource. For example, for Audio source, it points to function in which Audio driver is initialized and the corresponding context is released.
control
Pointer to function that sends the control command to the MMF module layer (see mm_module_ctrl) or a specific module. For example, for Audio source, it points to function that controls Audio parameters (“sample rate”, “word length”, “mic gain”, etc.) and MMF service task on or off.
handle
Pointer to the function that manipulates media data (how to produce data in source or how to consume data in sink). Data is transferred from source to sink and vice versa by means of OS message queue. Please note that MMF service task reacts differently based on message exchange buffer status.
new_item
Pointer to the function that creates queue item that will be send to input and output queue, will only be used when setting MM_CMD_INIT_QUEUE_ITEMS to MMQI_FLAG_STATIC.
del_item
Pointer to the function that destroys queue item, will only be used when setting MM_CMD_INIT_QUEUE_ITEMS to MMQI_FLAG_STATIC.
rsz_item
Pointer to the function decreases memory pool size, will only be used when video (H264, HEVC (H265)…) and AAC module is created.
output_type and module_type
Output_type indicates output mode. There are MM_TYPE_NONE, MM_TYPE_VSRC, MM_TYPE_ASRC, MM_TYPE_VDSP, MM_TYPE_ADSP, MM_TYPE_VSINK, MM_TYPE_ASINK, and MM_TYPE_AVSINK can be used, corresponding to different module usage scenarios, let application know which mode the output is. module_type represents the identity of the module, and there are three options can be used MM_MASK_SRC, MM_MASK_DSP and MM_MASK_SINK.
name
Pointer to the module name.
mm_module_ctrl
Here lists some commands defined in MMF module layer. Call by mm_module_ctrl (mm_context_t *ctx, int cmd, int arg) to use them.
MM_CMD_INIT_QUEUE_ITEMS: initialize static queue item.
MM_CMD_SET_QUEUE_LEN: Set one queue’s length.
MM_CMD_SET_QUEUE_NUM: Set number of queue, not more than 3.
MM_CMD_SELECT_QUEUE: select queue from multi queues.
MM_CMD_CLEAR_QUEUE_ITEMS: clear queue item.
Context
MMF context supplies message transfer between different modules. It contains mm_module_t, and queue that used to pass data. There are 6 types of status that mm_context support (MM_STAT_INIT, MM_STAT_READY, MM_STAT_ERROR, MM_STAT_ERR_MALLOC, MM_STAT_ERR_QUEUE, MM_STAT_ERR_NEWITEM), these status are responsible for maintaining the module state to ensure the program runs smoothly.
typedef struct mm_contex_s {
union {
struct {
xQueueHandle output_ready;
xQueueHandle output_recycle;
int32_t item_num;
};
mm_conveyor_t port[4];
};
mm_module_t* module;
void* priv; // private data structure for created instance
// module state
uint32_t state;
int32_t queue_num; // number of queue
int32_t curr_queue;
} mm_context_t;
The mm_context is responsible for maintaining each module entity. MMF support these modules (video, AAC_encoder, AAC_decoder, audio, g711, opus, mp4, rtp, rtsp) by default. Each module is independent and corresponding to the individual input/ output queue, state and in the mm_context of the module to update parameters and delivery entities.
Module Inter Connection
This section introduces mm_siso_t, mm_simo_t, mm_miso_t, mm_mimo_t and its corresponding create, delete, ctrl, start, stop, pause, resume function, which is responsible for connection and control between modules in mmf.
SISO module (Single Input Single Output)
The SISO module is a unidirectional interface between modules. Input and output are independent. The status of the SISO module is responsible for determining the correct process. The stack_size is used to determine the size of the handler, while xTaskHandle task, task_priority and taskname are reserved to control the use of the task, task priority and task name.
typedef struct mm_siso_s {
mm_context_t *input;
mm_context_t *output;
int input_port_idx; // default is 0, can be set to 1 or 2 or 3 if source module support 2 or more output queue
uint32_t status;
uint32_t stack_size;
uint32_t task_priority;
char taskname[16];
xTaskHandle task;
} mm_siso_t;
There are some functions in the SISO module responsible for the module inter-connection. By these functions, it will be simple to update the status of the task and are handed over to the task handler for the main processing:
siso_create
Pointer to the function that siso_create declares the space of mm_siso_t and returns mm_siso_t entity after initialization.
siso_delete
Pointer to the function that stops SISO execution and free space of mm_siso_t entity.
siso_ctrl
Pointer to the function that sends the control command to siso module.
MMIC_CMD_ADD_INPUT link the input module to the input of the sisomodule.
MMIC_CMD_ADD_OUTPUT link the output module to the output of the sisomodule.
MMIC_CMD_SET_TASKPRIORITY set the task priority for the linker task. If setting as 0, it will be configured to tskIDLE_PRIORITY + 1 automatically.
MMIC_CMD_SET_TASKNANE set the task names for the linker task.
MMIC_CMD_SET_STACKSIZE add size to the stack_size of siso.
Note
For consistency, the setting task size will be divided by 4. Make sure setting an enough and valid stack_size for the task.
siso_start
Pointer to the function that checks whether there is anything in the input and output module before siso start. If the answer is yes, siso task will create a task handler to send data from input module to the output module.
siso_stop
Pointer to the function that updates status to MMIC_STAT_SET_EXIT and wait for task handler to switch status to MMIC_STAT_EXIT.
siso_pause
Pointer to the function that updates status to MMIC_STAT_SET_PAUSE and wait for task handler to switch status to MMIC_STAT_PAUSE.
siso_resume
Pointer to the function that updates status to MMIC_STAT_SET_RUN and wait for the task handler to switch status to MMIC_STAT_RUN.
SIMO module (Single Input Multiple Output)
The SIMO module is a unidirectional interface between modules. Input and output are independent, and output_cnt represents the number of simultaneous output modules. The array – status[4] maintains the state of the SIMO module to check the process is correct in the middle of the transfer, stack_size is used to determine the size of the handler task for intermediate transfers. Similarly, it also provides xTaskHandle task, task_priority, taskname for xTaskCreate. Note that each output will be served by one unique task and pause mask will control which output will be blocked.
typedef struct mm_simo_s {
mm_context_t *input;
int output_cnt;
mm_context_t *output[4];
// internal queue to handle reference count and usage log
mm_simo_queue_t queue;
uint32_t pause_mask;
uint32_t status[4];;
uint32_t stack_size;
uint32_t task_priority;
char taskname[4][16];
xTaskHandle task[4];
} mm_simo_t;
There are some functions in the SIMO module responsible for the module inter-connection. By these functions, it will be simple to update the status of the task and are handed over to the task handler for the main processing:
simo_create
Pointer to the function that simo_create declares the space of mm_simo_t entity and returns mm_siso_t after initialization, and simo_create crate a queue head and a queue lock to protect the results of multiple outputs.
simo_delete
Pointer to the function that calls simo_stop() to stop SIMO execution and free space.
simo_ctrl
Pointer to the function that sends the control command to simo module.
MMIC_CMD_ADD_INPUT link the input module to the input of the simo module.
MMIC_CMD_ADD_OUTPUT0, MMIC_CMD_ADD_OUTPUT1, MMIC_CMD_ADD_OUTPUT2, MMIC_CMD_ADD_OUTPUT3 link output module to the corresponding output and increase the output_cnt to record number of output modules.
MMIC_CMD_SET_TASKPRIORITY set the task priority for the linker task. If setting as 0, it will be configured to tskIDLE_PRIORITY + 1 automatically.
MMIC_CMD_SET_TASKNANEx set the task names for the linker task corresponding to MMIC_CMD_ADD_OUTPUTx (x = 0~3).
MMIC_CMD_SET_STACKSIZE add size to simo stack_size.
Note
For consistency, the setting task size will be divided by 4 and it means each task will only have task_size/4 for task stack size. Make sure setting an enough and valid stack_size for the task.
simo_start
Pointer to the function that simo_start will create corresponding number of task handlers based on simo -> output_cnt, and each task handler will be used to send the received data.
simo_stop
Pointer to the function that simo_stop sets each simo status to MMIC_STAT_SET_EXIT,and waits for the task handler to switch each status to MMIC_STAT_EXIT.
simo_pause
Pointer to the function that simo_pause will set each simo -> status to MMIC_STAT_SET_PAUSE according to pause_mask, and wait for the task handler to switch each status to MMIC_STAT_PAUSE.
simo_resume
Pointer to the function that simo_resume will set each simo -> status to MMIC_STAT_SET_RUN, and wait for the task handler to switch each status to MMIC_STAT_RUN.
MISO module (Multiple Input Single Output)
The MISO module is a unidirectional interface between modules. Input and output are independent, and input_cnt represents the number of simultaneous input modules. The status maintains the state of the MISO module to check the process is correct in the middle of the transfer, stack_size is used to determine the size of the handler task for intermediate transfers, and finally the xTaskHandle task, task_priority and taskname are reserved for xTaskCreate to control the use of the task. The pause_mask can be controlled to block the inputs or the single output.
typedef struct mm_miso_s {
int input_cnt;
mm_context_t *input[4]; // max 4 input
int input_port_idx[4];
mm_context_t *output;
uint32_t pause_mask;
uint32_t status;
uint32_t stack_size;
uint32_t task_priority;
char taskname[16];
xTaskHandle task;
} mm_miso_t;
There are some functions in the MISO module responsible for the module inter-connection. By these functions, it will be simple to update the status of the task and are handed over to the task handler for the main processing:
miso_create
Pointer to the function that space of mm_miso_t is declared in miso_create and initialized to return mm_miso_t entity.
miso_delete
Pointer to the function that calls miso_stop() to stop MISO and free space.
miso_ctrl
Pointer to the function that sends the control command to miso module.
MMIC_CMD_ADD_INPUT0, MMIC_CMD_ADD_INPUT1, MMIC_CMD_ADD_INPUT2, MMIC_CMD_ADD_INPUT3 couple input modules to the corresponding miso input and increase the value of input_cnt for number of input module.
MMIC_CMD_ADD_OUTPUT links the output module to the output of the miso module.
MMIC_CMD_SET_TASKPRIORITY set the task priority for the linker task. If setting as 0, it will be configured to tskIDLE_PRIORITY + 1 automatically.
MMIC_CMD_SET_TASKNANE set the task names for the linker task.
MMIC_CMD_SET_STACKSIZE add size to miso stack_size.
Note
For consistency, the setting task size will be divided by 4. Make sure setting an enough and valid stack_size for the task.
miso_start
Pointer to the function that checks whether there is anything in the input and output module before starting. If the answer is yes, a task handler will be created, and the data of the input module will be sent to the output module.
miso_stop
Pointer to the function that sets the miso status to MMIC_STAT_SET_EXIT and wait for the task handler to switch the status to MMIC_STAT_EXIT.
miso_pause
Pointer to the function that miso_pause will set miso -> status to MMIC_STAT_SET_PAUSE according to pause_mask, waiting for the task handler to switch status to MMIC_STAT_PAUSE.
miso_resume
Pointer to the function that miso_resume will set miso -> status to MMIC_STAT_SET_RUN, waiting for the task handler to switch each status to MMIC_STAT_RUN.
MIMO module (Multiple Input Multiple Output)
The MIMO module is a unidirectional interface between modules, Input[4] and output[4] represent input and output modules respectively, and input_cnt represents the number of simultaneous input modules. Input and output support up to 4 outputs at the same time, MIMO module also needs mm_mimo_queue_t queue[4] to maintain the synchronization problem of each input queue. Each mm_mimo_queue_t has a lock and head to record the beginning of each queue and whether a program is already in use. The array, status[4], maintains the state of the MIMO module to determine the correct process in the middle of the transfer, stack_size is used to determine the size of the handler task for the intermediate transfer, and the xTaskHandle task of xTaskCreate is reserved to control the use of the task. The array, pause_mask[4], is used to control the input or output streaming for each task.
typedef struct mm_mimo_s {
int input_cnt;
// depend on intput count
mm_context_t* input[4];
mm_mimo_queue_t queue[4];
int output_cnt;
// depend on output count
uint32_t pause_mask[4];
mm_context_t* output[4]; // output module context
uint32_t output_dep[4]; // output depend on which input, bit mask
uint32_t input_mask[4]; // convert from output_dep, input referenced by which output, bit mask
uint32_t status[4];
uint32_t stack_size;
uint32_t task_priority;
char taskname[4][16];
xTaskHandle task[4];
} mm_mimo_t;
There are some functions in the MIMO module responsible for the module inter-connection. By these functions, it will be simple to update the status of the task and are handed over to the task handler for the main processing:
mimo_create
Pointer to the function mimo_create declares the space of mm_mimo_t entity and returns mm_mimo_t after initialization.
mimo_delete
Pointer to the function that calls mimo_stop() to stop the mimo module and free space.
mimo_ctrl
Pointer to the function that sends the control command to miso module.
MMIC_CMD_ADD_INPUT0, MMIC_CMD_ADD_INPUT1, MMIC_CMD_ADD_INPUT2, and MMIC_CMD_ADD_INPUT3 link input module to the input corresponding to the mimo module and increase the value of input_cnt to record the number of input modules.
MMIC_CMD_ADD_OUTPUT0, MMIC_CMD_ADD_OUTPUT1, MMIC_CMD_ADD_OUTPUT2, and MMIC_CMD_ADD_OUTPUT3 couple the output module to the output of the mimo module and increase the value of output_cnt to record the number of output modules. The inputs corresponding to outputs modules can be set by arg2 of mimo_ctrl using the union of MMIC_CMD_ADD_INPUTx.
MMIC_CMD_SET_TASKPRIORITY set the task priority for the linker task. If setting as 0, it will be configured to tskIDLE_PRIORITY + 1 automatically.
MMIC_CMD_SET_TASKNANE set the task names for the linker task.
Note
For consistency, the setting task size will be divided by 4 and it means each task will only have task_size/4 for task stack size. Make sure setting an enough and valid stack_size for the task.
mimo_start
Pointer to the function that mimo_start will generate corresponding task handler according to output_cnt to transfer the received data.
mimo_stop
Pointer to the function that mimo_stop will set the mimo status to MMIC_STAT_SET_EXIT according to output_cnt, and waiting for the task handler switch the status to MMIC_STAT_EXIT.
mimo_pause
Pointer to the function that miso_pause will set each mimo -> status to MMIC_STAT_SET_PAUSE according to pause_mask, and waiting for the task handler to switch status to MMIC_STAT_PAUSE.
mimo_resume
Pointer to the function that mimo_resume will set mimo -> status in the task of MMIC_STAT_PAUSE for each status to MMIC_STAT_SET_RUN, and waiting for the task handler to switch each status to MMIC_STAT_RUN.
MM_Module Type and Module Parameter
Video
The video module processes the data from sensor and outputs the video streaming data for user.
Here shows the context of the video module.
typedef struct video_ctx_s {
void *parent;
hal_video_adapter_t *v_adp;
void *mem_pool;
video_params_t params;
int (*snapshot_cb)(uint32_t, uint32_t);
void (*change_parm_cb)(void *);
video_state_t state;
} video_ctx_t;
v_adp: Point to the video adapter which will use in the video process.
params: Basic parameters for the video module.
snapshot_cb: Set the callback function for snapshot, which will be called while doing snapshot. It could be set by using CMD_VIDEO_SNAPSHOT_CB.
VOE heap presetting
Before starting any stream, the function video_voe_presetting() should be called to estimate and set the required heap size for the VOE.
int video_voe_presetting(int v1_enable, int v1_w, int v1_h, int v1_bps, int v1_shapshot,
int v2_enable, int v2_w, int v2_h, int v2_bps, int v2_shapshot,
int v3_enable, int v3_w, int v3_h, int v3_bps, int v3_shapshot,
int v4_enable, int v4_w, int v4_h);
Since the VOE heap requires a large amount of memory, to avoid memory fragmentation, the function video_voe_presetting() will only be effective on the first call unless video_voe_release() is explicitly called to reset the allocation.
void video_voe_release(void);
Basic video module parameters setting
Here are some video module parameters provided to set.
typedef struct video_param_s {
uint32_t stream_id;
uint32_t type;
uint32_t resolution;
uint32_t width;
uint32_t height;
uint32_t bps;
uint32_t fps;
uint32_t gop;
uint32_t rc_mode;
uint32_t jpeg_qlevel;
uint32_t rotation;
uint32_t out_buf_size;
uint32_t out_rsvd_size;
uint32_t direct_output;
uint32_t use_static_addr;
uint32_t fcs;
uint32_t use_roi;
struct video_roi_s {
uint32_t xmin;
uint32_t ymin;
uint32_t xmax;
uint32_t ymax;
} roi;
} video_params_t;
Use CMD_VIDEO_SET_PARAMS to set up the VIDEO parameters.
stream_id: Select the ISP channel, it can be set from 0~4.
type: Select the video encode type. Currently support HEVC (VIDEO_HEVC), H264 (VIDEO_H264), JPEG (VIDEO_JPEG), NV12 (VIDEO_NV12), RGB (VIDEO_RGB), NV16 (VIDEO_NV16), HEVC+JPEG (VIDEO_HEVC_JPEG) and H264+JPEG (VIDEO_H264_JPEG).
resolution: Set the video frame resolution. Currently support VIDEO_QCIF (144*176), VIDEO_CIF (288*352), VIDEO_WVGA (360*640), VIDEO_VGA (480*640), VIDEO_D1 (480*720), VIDEO_HD (720*1280), VIDEO_FHD (1080*1920), VIDEO_3M (1536*2048), VIDEO_5M (1944*2592).
width: Set the video frame resolution’s width.
height: Set the video frame resolution’s height.
bps: Configure the video encoder’s bit rate (bits per second).
fps: Configure the video module output frame rate (frames per second).
gop: Set the group of the picture which can be seem as the cycle that I frame will update.
rc_mode: Determine use CBR (1) or VBR (2).
direct_output: If set 1, the video module output will not be sent to the video module output ready queue.
use_static_addr: If setting use_static_addr to 1, the output_item data address will directly point to the isp_addr; while setting to 0, it will allocate a new space for the output item address.
use_roi: If set 1, the video will be cropped according to roi parameter settings.
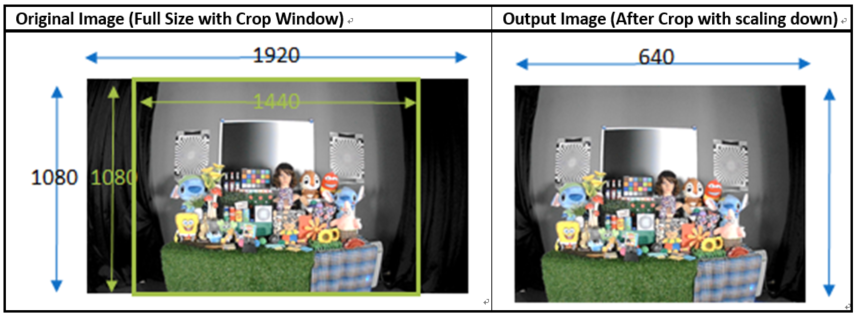
roi: If use_roi be set to 1, the original video will be cropped using the area defined by the four parameters (xmin, ymin, xmax, ymax), and then the cropped image will be resized according to the video frame resolution setting (width, height). For example, If set (xmin, ymin, xmax, ymax) to (0, 0, 800, 800), it will crop the top left corner of the image to a width of 800px and a height of 800px from the origin of video frame, and the cropped image will be scaled down to width x height according to resolution of video.
Note
In VOE, OSD is applied after the cropped and resized image, so OSD size and offset are not affected by video cropping and resizing.
Video resolution alignment
Encoder input width require 16 alignment and input height require 4 alignment, so video module will do width and height alignment automatically. For example, if user set (width, height) to (1080, 1080), ISP will give 1088x1080 video frame to encoder. Then, encoder will encode the data and crop to 1080x1080 as video module output.
ROI region parameters xmin, ymin, xmax, ymax should be 2 aligned and within the maximum resolution of the sensor. In addition, the roi_w(a.k.a. xmax-xmin) should no less than 16-aligned video_w (a.k.a. 16-aligned width) and roi_h (a.k.a. ymax-ymin) should no less than video_h(a.k.a. height), because the ROI only support scale down. In other words, if user want a 1080x1080 output of video module and require the usage of ROI, the ROI region width should >=1088 and ROI region height should >=1080.
Note
Sensor model and ISP will restrict the video resolution and fps. For the sensor’s max resolution and fps, please check the sensor list in ISP chapter. The ISP supported max resolutions for each channel are as followed:
Ch0: 2704 x 1960
Ch1: 1920 x 1080
Ch2: 2592 x 1688
Ch4: 1280 x 720
Please confirm the selected width, height and fps of each video channel are within the limits.
For VOE 1.4.3.0 and its later version, the ISP supported max resolution for all channel is 2704 x 1960.
Video scale up function
After VOE1.5.6.0, the scale up function is supported, but there are some limitations: (1) Only ch0 can scale up. (2) All streams need to be closed when setting the scale up function. (3) The maximum scale up resolution cannot exceed twice the ROI resolution. (4) The maximum resolution is 2688x1944. (5) The scale function supports ROI settings, but the ROI settings will be applied to all streams and do not support individual stream ROI settings.
Video resolution adjustment
Amebapro2 ISP support scaling down function with non-aspect ratio window ( it should be less than sensor output size). User can set 「use_roi」to enable this function. Take example for 1080P sensor below:
typedef struct video_param_s {
// …
uint32_t width; // 640
uint32_t height; // 480
// …
uint32_t use_roi;
struct video_roi_s {
uint32_t xmin; // 240
uint32_t ymin; // 0
uint32_t xmax; // 1679
uint32_t ymax; // 1079
} roi;
} video_params_t;
Table 1-1 Image aspect ratio example image (full view)
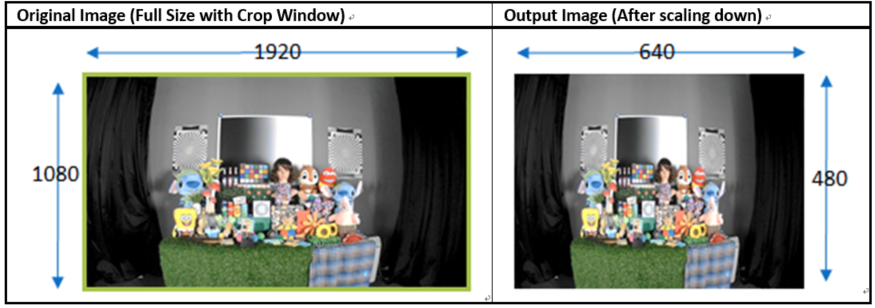
Table 1-2 Image aspect ratio example image (partial view)
VOE log show option adjustment
Users can adjust the VOE log display options to provide additional information for debugging purposes. For normal booting, the VOE log is default disable in “video_api.h”. To enable VOE log, please set APP_VOE_LOG_EN to 1.
#define APP_VOE_LOG_EN 0
For FCS booting, the VOE log is disabled by default for better time measurement quality. To enable VOE log in FCS mode, please set BOOTLOADER_VOE_LOG_EN = 1 in “video_boot.h”.
#define BOOTLOADER_VOE_LOG_EN 0
Note
Note that enabling VOE log in the bootloader will cause some conflicts when ROM log is disabled.
If need to dynamically adjust the VOE display settings, users can use the following command. Modify the VOE log settings: Set ‘enable’ to 0 to disable the VOE log and to 1 to enable it.
video_ctrl(0, VIDEO_DEBUG, enable);
Video module rate control (RC) adjustment
Amebapro2 support two bit rate control mode, Variable Bitrate (VBR) and Constant Bitrate (CBR), all based on frame level rate control.
Variable bitrate mode (VBR):
Taking the set 1/2 bps as the target bitrate, the actual picture quality is optimize through the set minQp and maxQp. When the scene can be effectively compressed to reduce the bitrate, the compressed Qp will go to minQp until minQP is the best picture set. When the scene cannot effectively compress the bitrate, the compression Qp goes to maxQp until maxQP is the maximum compression rate. At this time, if the maxQP setting is larger, the compression efficiency will be better. Exceeds the set Max bitrate. QP range default value is [20, 45], If there is an adjustment requirement in the [minQp, maxQp] control of VIDEO_SET_RCPARAM.
Constant bitrate mode (CBR):
Fixed bit rate, bit rate is control by bps setting, QP range default value is [0, 51], If there is an adjustment requirement in the [minQp, maxQp] control of VIDEO_SET_RCPARAM.
Amebapro2 provide four parameters for image quality adjustment, Adjust the deviation of the direct QP of I frame and P frame, and control the size ratio between I frame and P frame. The smaller the QP of I frame, the larger I frame, and the clearer the image, which improves the overall image quality to a certain extent.
However, I frame cannot be adjusted too large. I frame eats up all the bandwidth, and P frame can only be edited to be more blurred, which aggravates the breathing effect.
intraQpDelta: QP adjustment for intra frames.
picQpDeltaRange: QP range of the single frame.
smoothPsnrInGOP: Smooth the PSNR for frames in one GOP.
chromaQPOffset: Chroma QP index offset.
Framerate Adjustment
There are two limitations of setting framerate for multi-channel video stream.
The framerate of the first open video channel must be the maximum framerate.
When video streaming on, if the maximum framerate is adjusted to new value, the framerate of other channel will be scaled at the same time. For example, if the maximum framerate of channel 0 is 30, and the framerate of channel 2 is 15. Then the framerate of channel 1 is adjusted to 20, the framerate of channel is adjusted to 10. So the framerate adjustment is used to adjust the maximum framerate and scale other framerate.
Video Auto Rate Control Mechanism
Amebapro2 provide video auto rate control mechanism for video stream by setting for parameters which are as bellow.
typedef struct rate_control {
uint32_t sampling_time;
uint32_t maximun_bitrate;
uint32_t minimum_bitrate;
uint32_t target_bitrate;
} rate_ctrl_t;
sampling_time: It is the unit of the video rate control, and It’s based on the setting of the GOP of the video channel which we want to do the video auto rate control because I frame is the largest frame.
maximun_bitrate: It is the threshold of the high rate control. If the bitrates is higher than maximun_bitrate, the system will do the video rate control automatically by dropping a half of frames and maintain the current bitrate until the low rate control is triggered.
minimum_bitrate: It is the threshold of the low rate control. If the bitrates is lower than minimum_bitrate, the system will do the video rate control automatically by restoring the original framerate and maintain the current bitrate until the high rate control is triggered.
target_birate: It is the expected bitrates of the user. If minimum_bitrate is not be set or higher than maximum_bitrate, the system will use target_bitrate for the threshold of the low rate control.
How to enable the mechanism: Please reference the example, mmf2_video_example_v1_rate_control_init.c.
Video Initial AE, AWB Settings
This function can help stabilize the image faster by setting the video initial AE, AWB parameters.
Use CMD_VIDEO_PRE_INIT_SAVE to save video initial parameters, support SAVE_TO_STRUCTURE, SAVE_TO_FLASH, SAVE_TO_RETENTION. If meta data is enable, It will get current AE, AWB value from meta data; otherwise, it will get current AE, AWB with ISP control API, and will take 90ms.
SAVE_TO_STRUCTURE: Save video initial AE, AWB settings to video pre-initial structure. Data will only be saved in active mode.
SAVE_TO_FLASH: Save video initial AE, AWB settings to flash. Data will be saved for all mode, but please check the flash write limit.
SAVE_TO_RETENTION: Save video initial AE, AWB settings to SRAM retention. Please uncomment the USE_ISP_RETENTION_DATA definition in video_api.h. Data will be saved in active mode and standby mode.
//#define USE_ISP_RETENTION_DATA
#ifdef USE_ISP_RETENTION_DATA
typedef struct isp_retention_data_s {
uint32_t checksum;
uint32_t ae_exposure;
uint32_t ae_gain;
uint32_t awb_rgain;
uint32_t awb_bgain;
//uint32_t als_value; //user can check als to decide using isp init setting or not
} isp_retention_data_t;
#endif
Use CMD_VIDEO_PRE_INIT_LOAD to load video initial parameters, support SAVE_TO_STRUCTURE, SAVE_TO_FLASH, SAVE_TO_RETENTION. For FCS mode, it will automatically load video initial parameters from flash and retention.
SAVE_TO_STRUCTURE: Load video initial AE, AWB settings from video pre-initial structure.
SAVE_TO_FLASH: Load video initial AE, AWB settings from flash.
SAVE_TO_RETENTION: Load video initial AE, AWB settings from SRAM retention
Video error return
The video error return code includes the error category, which can be obtained through video_get_error_group() for debugging purposes.
int video_get_error_group(int error_id);
Please refer to the table below for the correspondence between video error code ranges and error categories.
Video Error Category |
Error Code Range |
|---|---|
VOE |
0x88000000 - 0x8FFFFFFF |
ISP Flow |
0x90000000 - 0x97FFFFFF |
Sensor Driver |
0x98000000 - 0x9FFFFFFF |
Mod |
0xA0000000 - 0xA7FFFFFF |
OSD |
0xA8000000 - 0xAFFFFFFF |
RTSP
typedef struct rtsp2_params_s {
uint32_t type;
union {
struct rtsp_video_param_s {
uint32_t codec_id;
uint32_t fps;
uint32_t bps;
uint32_t ts_flag;
char* sps;
char* pps;
char* lv;
} v;
struct rtsp_audio_param_s {
uint32_t codec_id;
uint32_t channel;
uint32_t samplerate;
} a;
struct rtsp_audio_opus_param_s {
uint32_t codec_id;
uint32_t channel;
uint32_t samplerate;
uint32_t max_average_bitrate;
uint32_t frame_size;
} a_opus;
} u;
} rtsp2_params_t;
Use CMD_RTSP2_SELECT_STREAM to select the RTSP stream index, currently support 0 and 1.
Use CMD_RTSP2_SET_PARAMS to set up the RTSP parameters.
type: Media type, available Video (AVMEDIA_TYPE_VIDEO), Audio (AVMEDIA_TYPE_AUDIO).
codec_id: RTSP supported codec ID, available AV_CODEC_ID_MJPEG, AV_CODEC_ID_H264, AV_CODEC_ID_PCMU, AV_CODEC_ID_PCMA, AV_CODEC_ID_MP4A_LATM, AV_CODEC_ID_MP4V_ES, AV_CODEC_ID_H265, AV_CODEC_ID_OPUS, AV_CODEC_ID_RGB888.
fps: Video frame rate.
bps: Bit per second
ts_flag: H264 rtsp time sync enable switch.
sps,pps,lv: Set sps, pps and profile level of H264.
channel: Audio channel.
samplerate: Audio samplerate.
max_average_bitrate: Set the max_average_bitrate for OPUS rtsp.
frame_size: Set the using OPUS encode frame size (the unit is msec) which will be related to the timestamp increase of opus rtp packet.
Current codec table:
static const struct codec_info av_codec_tables[] = {
{AV_CODEC_ID_MJPEG, "MJPEG", RTP_PT_JPEG, 90000, 0, 0},
{AV_CODEC_ID_H264, "H264", RTP_PT_DYN_BASE, 90000, 0, 0},
{AV_CODEC_ID_PCMU, "PCMU", RTP_PT_PCMU, 8000, 1, 0},
{AV_CODEC_ID_PCMA, "PCMA", RTP_PT_PCMA, 8000, 1, 0},
{AV_CODEC_ID_MP4A_LATM, "MP4A", RTP_PT_DYN_BASE, 8000, 2, 0},
{AV_CODEC_ID_MP4V_ES, "MP4V", RTP_PT_DYN_BASE, 90000, 0, 0},
{AV_CODEC_ID_H265, "H265", RTP_PT_DYN_BASE, 90000, 0, 0},
{AV_CODEC_ID_OPUS, "opus", RTP_PT_DYN_BASE, 48000, 2, 0}
};
AAC Encoder (AAC)
//AAC header type
typedef enum {
AAC_TYPE_RAW = TT_MP4_RAW, // For AAC raw pqacket
AAC_TYPE_ADTS = TT_MP4_ADTS, // For AAC with ADTS header
} AAC_TRANSPORT_TYPE;
//AAC audio object type
typedef enum {
AAC_AOT_LC = AOT_AAC_LC, // MP4 Low Complexity
AAC_AOT_SBR = AOT_SBR, // MP4 LC + Spectral Band Replication (HE-AAC v1)
AAC_AOT_PS = AOT_PS, // MP4 LC + SBR + Parametric Stereo (HE-AAC v2)
AAC_AOT_ER_LD = AOT_ER_AAC_LD, // Error Resilient(ER) AAC LowDelay
AAC_AOT_ER_ELD = AOT_ER_AAC_ELD, // Enhanced Low Delay
} AAC_AOT_TYPE;
typedef struct aac_param_s {
AAC_TRANSPORT_TYPE trans_type; // Transport Type
AAC_AOT_TYPE object_type; // Audio Object Type
uint32_t sample_rate; // 8000
uint32_t channel; // 1
uint32_t bitrate;
uint32_t mem_total_size;
uint32_t mem_block_size;
uint32_t mem_frame_size;
//...
} aac_params_t;
Use CMD_AAC_SET_PARAMS to set up the AAC parameters.
trans_type: The AAC encoder audio transport type (header type). Currently, support raw header (AAC_TYPE_RAW) and adts header (AAC_TYPE_ADTS).
object_type: The AAC audio object type. Support Low Complexity (AAC_AOT_LC), HE-AAC v1 (AAC_AOT_SBR), HE-AAC v2 (AAC_AOT_PS), LD-AAC (AAC_AOT_ER_LD) and ELD-AAC (AAC_AOT_ER_ELD).
sample_rate: Sample rate for AAC encoder must be the same as the Audio codec setting. For instance, if using ASR_8KHZ as the Audio codec sample rate, the sample rate of AAC must be configured to 8000 or the codec result will be unexpected.
channel: Set the audio channel number. The mono is set as 1, while the stereo is set as 2. This setting is related to the Audio codec.
Bitrate: Set bitrate for aac streaming.
mem_total_size: Memory pool size of AAC encoder output.
mem_block_size: Block size used by Memory pool.
mem_frame_size: Set maximum FRAME SIZE capacity.
AAC Decoder (AAD)
//AAD header type
typedef enum {
AAD_TYPE_RAW = 0, // For AAC without AU-header (not from AAC rtp packet header)
AAD_TYPE_ADTS = 2, // For AAC with ADTS header
AAD_TYPE_RTP_RAW = 3, // For AAC with AU-header (from AAC rtp packet header)
} AAD_TRANSPORT_TYPE;
//AAD audio object type
typedef enum {
AAD_AOT_LC = AOT_AAC_LC, // MP4 Low Complexity
AAD_AOT_SBR = AOT_SBR, // MP4 LC + Spectral Band Replication (HE-AAC v1)
AAD_AOT_PS = AOT_PS, // MP4 LC + SBR + Parametric Stereo (HE-AAC v2)
AAD_AOT_ER_LD = AOT_ER_AAC_LD, // Error Resilient(ER) AAC LowDelay
AAD_AOT_ER_ELD = AOT_ER_AAC_ELD, // Enhanced Low Delay
} AAD_AOT_TYPE;
typedef struct aad_param_s {
AAD_TRANSPORT_TYPE trans_type; // Transport Type
AAD_AOT_TYPE object_type; // Audio Object Type
uint32_t sample_rate; // 8000
uint32_t channel; // 1
} aad_params_t;
Use CMD_AAD_SET_PARAMS to set up the AAD parameters.
trans_type: The AAC decoder audio transport type (header type). Currently, support raw header (AAD_TYPE_RAW), raw header through rtp (AAD_TYPE_RTP_RAW) and adts header (AAD_TYPE_ADTS).
object_type: The AAC audio object type. Support Low Complexity (AAD_AOT_LC), HE-AAC v1 (AAD_AOT_SBR), HE-AAC v2 (AAD_AOT_PS), LD-AAC (AAD_AOT_ER_LD) and ELD-AAC (AAD_AOT_ER_ELD).
sample_rate: Sample rate for AAC decoder must be the same as the Audio codec setting. For instance, if using ASR_8KHZ as the Audio codec sample rate, the sample rate of AAC must be configured to 8000 or the codec result will be unexpected. If the AAC trans_type is AAD_TYPE_ADTS, it will parser the sample rate from ADTS header.
channel: Set the audio channel number. The mono is set as 1, while the stereo is set as 2. This setting is related to the Audio codec.
Audio Codec
The ASP algorithms, AGC (Automatic gain control), ANS (Adaptive noise suppression), AEC (Acoustic echo cancellation) and VAD (Voice Activity Detection), are included in this module.
typedef struct audio_param_s {
audio_sr sample_rate; // ASR_8KHZ
audio_wl word_length; // WL_16BIT
audio_mic_gain mic_gain; // MIC_40DB
audio_dmic_gain dmic_l_gain; // DMIC_BOOST_24DB
audio_dmic_gain dmic_r_gain; // DMIC_BOOST_24DB
int channel; // 1
int mix_mode; // 0
uint8_t use_mic_type; // 0: AMIC 1: DMIC
int mic_bias; // 0:0.9 1:0.86 2:0.75
int hpf_set; // 0~7
eq_cof_t mic_l_eq[5];
eq_cof_t mic_r_eq[5];
eq_cof_t spk_l_eq[5];
int ADC_gain;
int DAC_gain;
int ADC_mute;
int DAC_mute;
int enable_record;
uint8_t avsync_en;
} audio_params_t;
Use CMD_AUDIO_SET_PARAMS to set up the audio parameters.
sample_rate: Currently support 8K (ASR_8KHZ), 16K, 32K, 44.1K (ASR_44p1KHZ), 48K, 88.2K, 96K HZ.
word_length: Currently support 16 bits (WL_16BIT), 24 bits (WL_24BIT).
mic_gain: Analog microphone gain value. Support 0, 20, 30, 40 DB.
dmic_l_gain: Left digital gain value. Support 0, 12, 24, 36 DB.
dmic_r_gain: Right digital gain value. Support 0, 12, 24, 36 DB.
channel: The number of channel is supported. Currently, support mono so set it to 1.
use_mic_type: set the mic type, 0 is the analog microphone, 1 is the left digital mic, 2 is the right digital mic and 3 is the stereo digital mic.
mic_bias: set the amic bias, the default value is 0.
hpf_set: set the hpf level in mic path.
mic_l_eq[5]: five band eq filters for setting in left mic path (amic path).
mic_r_eq[5]: five band eq filters for setting in right mic path.
spk_l_eq[5]: five band eq filters for setting in speaker path.
ADC_gain: set the dgain for mic path. Support -17.625dB (0x00) ~ 30dB (0x7F).
DAC_gain: set the dgain for speaker path. -65.625dB (0x00) ~ 0dB (0xAF).
ADC_mute: set the mute mic path or not when doing initialization.
DAC_mute: set the mute speaker path or not when doing initialization.
enable_record: enable the audio recording or not. If enabling, it will execute the function set by CMD_AUDIO_SET_MIC_RECORD_FUN.
avsync_en: this parameter is for user need to add audio dummy frame to sync audio and video.
RTP Input
typedef struct rtp_param_s {
uint32_t valid_pt;
uint32_t port;
uint32_t frame_size;
uint32_t cache_depth;
} rtp_params_t;
Use CMD_AUDIO_SET_PARAMS to set up the audio parameters.
valid_pt: Processable RTP payload types. Set 0xFFFFFFFF to handle RTP_PT_PCMU (0), RTP_PT_PCMA (8) and RTP_PT_DYN_BASE (dynamic, default setting 96).
port: The port to receive the RTP packet.
frame_size: Maximum RTP packet size.
cache_depth: The number of caches for RTP packets. The cache handler will send the RTP packet in the cache to the output of the module when the number of packets in the cache >= 50% cache depth.
G711 Codec
G711 Encode and G711 Decode use the same parameter structure.
typedef struct g711_param_s {
uint32_t codec_id; // AV_CODEC_ID_PCMA or AV_CODEC_ID_PCMU
uint32_t buf_len; // output buffer length
uint32_t mode; // decode or encode
} g711_params_t;
Use CMD_G711_SET_PARAMS to set up the G711 parameters.
codec_id: Set the codec type for G711 encoder/decoder. G711 currently supports PCMU (AV_CODEC_ID_PCMA) and PCMA (AV_CODEC_ID_PCMU) codec modes.
buf_len: Determine the length (byte) of the encode buffer.
mode: Determine whether the G711 codec module is an encoder (G711_ENCODE) or decoder (G711_DECODE).
OPUS Encoder (OPUSC)
typedef struct opusc_param_s {
uint32_t sample_rate; // 8000
uint32_t channel; // 1
uint32_t bit_length; // 16
uint32_t complexity;
uint32_t use_framesize;
//VBR CBR setting
uint32_t bitrate; //default 25000
uint32_t enable_vbr;
uint32_t vbr_constraint;
uint32_t packetLossPercentage;
uint32_t opus_application;
int samples_input;
int max_bytes_output;
} opusc_params_t;
Use CMD_OPUSC_SET_PARAMS to set up the OPUSC parameters.
sample_rate: Sample rate for OPUS encoder must be the same as the Audio codec setting. For instance, if using ASR_8KHZ as the Audio codec sample rate, the sample rate of OPUS must be configured to 8000 or the codec result will be unexpected.
channel: Set the audio channel number. The mono is set as 1, while the stereo is set as 2. This setting is related to the Audio codec.
bit_length: The bit length use in OPUS encoder. The bit length configuration must be identical to the Audio codec, like if audio codec word length is equal to WL_16BIT, which must be set to 16.
complexity: Set the opus encoder’s complexity, and the value is from 0 (low complexity) to 10 (high complexity). The higher complexity is configured the better quality encoding at a given bitrate but it also means more CPU consumption.
use_framesize: The frame size contains in one OPUS packet. Since it will be related to the opus rtsp timestamp, if using RTSP, this must be the same as frame_size in rtsp module. Recommend to be the same or larger than AUDIO_DMA_PAGE_SIZE/(sample_rate / 1000)/2 but less than 60.
bitrate: Set the bit rate for the opus encoder, the default value is 25000.
enable_vbr: Enable VBR (variable bit rate) of the opus encoder.
vbr_constraint: Makes constrained VBR if setting as 1.
packetLossPercentage: Set the percentage of packet loss, the default value is 0.
opus_application: Set the opus application type, broadcast/high-fidelity application (OPUS_APPLICATION_AUDIO), VoIP/videoconference applications (OPUS_APPLICATION_VOIP) and lowest-achievable latency (OPUS_APPLICATION_RESTRICTED_LOWDELAY). The default setting is OPUS_APPLICATION_AUDIO.
samples_input: Not need to be set, it will be automatically set in the process of opus encoder.
max_bytes_output: Not need to be set, it will be automatically set in the process of opus encoder.
OPUS Decoder (OPUSD)
typedef struct opusd_param_s {
uint32_t sample_rate; // 8000
uint32_t channel; // 1
uint32_t bit_length; // 16
uint32_t frame_size_in_msec;
uint32_t opus_application;
uint8_t with_opus_enc;
int samples_input;
int max_bytes_output;
} opusd_params_t;
Use CMD_OPUSD_SET_PARAMS to set up the OPUSD parameters.
sample_rate: The sample of the opus packet will be decoded, must be the same as the audio codec.
channel: Need to match source channel to decode correctly.
bit_length: The audio bit length will be decoded, suggest to set as 16.
frame_size_in_msec: No need to be set, it will be automatically set when using it.
opus_application: Set the opus application type, broadcast/high-fidelity application (OPUS_APPLICATION_AUDIO), VoIP/videoconference applications (OPUS_APPLICATION_VOIP) and lowest-achievable latency (OPUS_APPLICATION_RESTRICTED_LOWDELAY). The default setting is OPUS_APPLICATION_AUDIO.
with_opus_enc: Set to 1, if the application with opus encoder.
samples_input: Not need to be set, it will be automatically set in the process of opus decoder.
max_bytes_output: Not need to be set, it will be automatically set in the process of opus decoder.
MP4
typedef struct mp4_param_s {
uint32_t width;
uint32_t height;
uint32_t fps;
uint32_t gop;
uint32_t sample_rate;
uint32_t channel;
uint32_t record_length;
uint32_t record_type;
uint32_t record_file_num;
char record_file_name[32];
uint32_t fatfs_buf_size;
uint32_t mp4_user_callback;
} mp4_params_t
Use CMD_MP4_SET_PARAMS to set up the MP4 parameters.
width: Set the max video frame width.
height: Set the max video frame height.
fps: Set the frame number per second.
gop: Set the group of the picture which can be seemed as the cycle that I frame will update.
sample_rate: The audio sample rate.
channel: The audio channel number.
record_length: Set the record file length in second.
record_type: Set the record media type, STORAGE_ALL (with bot audio and video), STORAGE_VIDEO (video only), STORAGE_AUDIO (audio only).
record_file_num: Set the number of file that will be recorded.
record_file_name: Set the record file name.
fatfs_buf_size: FATFS cache buffer size.
mp4_user_callback: Configure the user callback function. If enable this, be sure that callback function for open (CMD_MP4_SET_OPEN_CB), write (CMD_MP4_SET_WRITE_CB), seek (CMD_MP4_SET_SEEK_CB) and close (CMD_MP4_SET_CLOSE_CB) have been set.
I2S
typedef struct i2s_param_s {
int sample_rate; // SR_32KHZ
int out_sample_rate; // SR_8KHZ
int word_length; // WL_24b
int out_word_length; // WL_16b
audio_mic_gain mic_gain; // MIC_40DB
int channel; // 1
int out_channel;
int enable_aec; // 0
int mix_mode; // 0
} i2s_params_t;
Use CMD_I2S_SET_PARAMS to set up the I2S parameters.
sample_rate: Currently support 8K, 16K, 32K, 44.1K, 48K, 88.2K, 96K (, 12K, 24K, 64K 192K, 384K, 7.35K, 11.025K, 14.7K, 22.05K, 58.8K, 176.4K) HZ
out_sample_rate: Currently supported sampling rate is the same as the sample rate, but less than or equal to sample_rate.
word_length: 16 (WL_16b), 24 (WL_24b), 32 (WL_32b) bits.
out_word_length: Currently supported bit depth is the same as the word_length, but less than or equal to word_length.
mic_gain: Microphone gain value. Support 0, 20, 30, 40 DB.
channel: Currently supports stereo or mono, please set to 2 or 1, and also supports 5.1 channels (but only support tx).
out_channel: Currently supported channel is the same as the channel, but less than or equal to channel.
enable_aec: The switch of enabling AEC.
mix_mode: The switch of enabling mix mode.
Httpfs
The httpfs module to construct a HTTP File Server and send the media file on it.
typedef struct httpfs_param_s {
char fileext[4];
char filedir[32];
char request_string[128];
uint32_t fatfs_buf_size;
} httpfs_params_t;
Use CMD_HTTPFS_SET_PARAMS to set up the HTTPFS parameters.
fileext: Set the file extension, for example “mp4”.
filedir: Directory where the file is located, for example “VIDEO”.
request_string: The string of http page, for example “/video_get.mp4”.
fatfs_buf_size: Buffer size of read file.
Array
The array module is use to play the small size and predefinition media streaming (like doorbell ring). It can be seemed as a source module.
typedef struct array_param_s {
uint32_t type;
uint32_t codec_id;
uint8_t mode;
union {
struct array_video_param_s {
uint32_t fps;
uint8_t h264_nal_size;
} v;
struct array_audio_param_s {
uint32_t channel;
uint32_t samplerate;
uint32_t sample_bit_length;
uint32_t frame_size;
} a;
} u;
} array_params_t;
typedef struct array_s {
uint32_t data_addr;
uint32_t data_len;
uint32_t data_offset;
} array_t;
Use the command CMD_ARRAY_SET_PARAMS to set up the parameters for the array module.
type: Media type, available Video (AVMEDIA_TYPE_VIDEO), Audio (AVMEDIA_TYPE_AUDIO).
codec_id: Set the codec ID of the array, like AV_CODEC_ID_MJPEG, AV_CODEC_ID_H264, AV_CODEC_ID_PCMU, AV_CODEC_ID_PCMA, AV_CODEC_ID_MP4A_LATM, AV_CODEC_ID_MP4V_ES, AV_CODEC_ID_H265, AV_CODEC_ID_OPUS, AV_CODEC_ID_RGB888.
mode: set the array play mode, once (ARRAY_MODE_ONCE) or repeat (ARRAY_MODE_LOOP).
h264_nal_size: Set the NALU length of h264 or h265 media array.
channel: Set the audio channel.
samplerate: Set the audio sample rate.
sample_bit_length: bit length for one audio sample.
frame_size: Set the using audio frame size (the unit is samples).
Use the command CMD_ARRAY_SET_ARRAY to set up the array input.
data_addr: Set the media array store address.
data_len: Set the media array total size.
data_offset: Set the offset that will be started to play and it will also be used to keep the play location while the array module process.
Using the MMF example
Describe how to use the sample program to construct the applicational data stream .
In this section, there will be an introduction to correctly select the mmf sample program and adjust the parameters.
Selecting and setting up sample program
For audio only samples, they are in function example_mmf2_audio_only while video joined samples are listed in example_mmf2_video_surport. Pick the example want to open before using it, remove the comment, and recompile. Opening more than two examples at the same time will result in unpredictable program execution results.
Requisites and Setup
Pre-requisites:
AmebaPro2 board
Camera sensor board
Micro USB cable
WIFI (for transferring rtsp stream)
MicroSD card (for saving the mp4 data)
Hardware setup:
Connect the camera sensor board to the AmebaPro2’s camera sensor board slot (CON1).
Connect the PC with the AmebaPro2 CON8 port by the Micro USB cable.
Insert the MicroSD card to the AmebaPro2’s SD card slot.
Software setup:
In projectrealtek_amebapro2_v0_exampleincplatform_opts.h select the usage sensor.
For audio only example, use “cmake .. -G”Unix Makefiles” -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DEXAMPLE=media_framework” to build up the project.
For video joined example, use “cmake .. -G”Unix Makefiles” -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DVIDEO_EXAMPLE=on” to build up the project.
Uncomment the example you want to execute.
The sample program is located at:
Audio only: \component\example\media_framework\example_media_framework.c
Video joined: \project\realtek_amebapro2_v0_example\src\mmfv2_video_example\video_example_media_framework.c
For example: open mmf2_video_example_joint_test_rtsp_mp4_init
// Joint test RTSP MP4
// H264 -> RTSP (V1)
// H264 -> MP4 (V2)
// AUDIO -> AAC -> RTSP and mp4
// RTP -> AAD -> AUDIO
//mmf2_video_example_joint_test_rtsp_mp4_init();
Uncomment the example want to execute
// Joint test RTSP MP4
// H264 -> RTSP (V1)
// H264 -> MP4 (V2)
// AUDIO -> AAC -> RTSP and mp4
// RTP -> AAD -> AUDIO
mmf2_video_example_joint_test_rtsp_mp4_init();
Note
Uncomment two media examples in the same time may cause unexpected result.
Compile and execute firmware. The compilation and execution can refer to the previous chapter.
Currently supported example
Audio only examples:
Example |
Description |
Result |
|---|---|---|
mmf2_example_a_init |
audio -> AAC -> RTSP(A) |
AmebaPro2’s AAC sound stream over the network. The sound received by AmebaPro2 is encoded by AAC and then streamed through the network (rtsp). |
mmf2_example_audioloop_init |
PCM audio -> PCM audio , audio loopback |
The sound received by AmebaPro2 can be broadcast from the 3.5 audio channel of AmebaPro2, and the PCM transmission is directly used in the procedure. |
mmf2_example_g711loop_init |
audio -> G711E -> G711D -> audio |
The sound received by AmebaPro2 can be broadcast from the 3.5 audio channel of AmebaPro2. PCM is encoded by G711 and transmit, then decoded by G711 and playback. |
mmf2_example_aacloop_init |
audio -> AAC -> AAD -> audio |
The sound received by AmebaPro2 can be broadcast from the 3.5 audio channel of AmebaPro2. PCM is encoded by AAC and transmit, then decoded by AAD and playback. |
mmf2_example_rtp_aad_init |
RTP -> AAD -> audio |
Stream AAC sound over the network to AmebaPro2 for playback. Streaming audio is decoded by AAD and played through 3.5 audio jack. |
mmf2_example_2way_audio_init |
audio -> AAC -> RTSP RTP -> AAD -> audio |
Stream AAC sound to AmebaPro2’s audio jack via the network and transmit the sound received by AmebaPro2 over the network simultaneously. |
mmf2_example_pcmu_array_rtsp_init |
ARRAY (PCMU) -> RTSP (A) |
Transmitting PCMU sound arrays within AmebaPro2 over the network. |
mmf2_example_aac_array_rtsp_init |
ARRAY (AAC) -> RTSP (A) |
Transfer AAC sound arrays in AmebaPro2 over the network. |
mmf2_example_opusloop_init |
audio -> OPUSC -> OPUSD -> audio |
The sound received by AmebaPro2 can be broadcast from the 3.5 audio channel of AmebaPro2. PCM is encoded by OPUS and transmit, then decoded by OPUS and playback. |
mmf2_example_a_opus_init |
Audio -> OPUSC -> RTSP(A) |
AmebaPro2’s OPUS sound stream over the network. The sound received by AmebaPro2 is encoded by OPUSC and then streamed through the network (rtsp). |
mmf2_example_rtp_opusd_init |
RTP -> OPUSD -> audio |
Stream OPUSC sound over the network to AmebaPro2 for playback. Streaming audio is decoded by OPUSD and played through 3.5 audio jack. |
mmf2_example_2way_audio_init |
audio -> OPUSC -> RTSP RTP -> OPUSD -> audio |
Stream OPUS sound to AmebaPro2’s audio jack via the network and transmit the sound received by AmebaPro2 over the network simultaneously. |
mmf2_example_pcm_array_audio_init |
Array (pcm) -> audio |
Play the array pcm data through AmebaPro2 |
mmf2_example_2way_audio_g711_doorbell_init |
AUDIO -> G711E -> RTSP RTP -> G711D -> AUDIO ARRAY (PCMU) -> G711D -> AUDIO (doorbell) |
(2) PCMU sound can be streamed to AmebaPro2 via the Internet and playback
|
mmf2_example_opus_array_rtsp_init |
Opus array -> opus decoder -> audio RTP -> G711D -> AUDIO |
Decode the opus array and play the array pcm data through AmebaPro2 |
Video only examples: (the max specification of the sensor is defined in projectrealtek_amebapro2_v0_exampleincsensor.h)
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_v1_init |
CH1 Video -> H264/H265 -> RTSP |
Transfer AmebaPro2’s H264/HEVC video stream over the network. Video default format: max sensor specification. |
mmf2_video_example_v2_init |
CH2 Video -> H264/H265-> RTSP |
Transfer AmebaPro2’s H264/HEVC video stream over the network. Video default format: max sensor specification. |
mmf2_video_example_v3_init |
CH3 Video -> JPEG -> RTSP |
Transfer AmebaPro2’s JPEG video stream over the network. Video default format: the width, height with max sensor specification and FPS 5. If the width or height of max sensor specification is large than 2040, it will be limited to 2040. |
mmf2_video_example_v1_shapshot_init |
CH1 Video -> H264/H265-> RTSP + SNAPSHOT |
Transfer AmebaPro2’s H264/HEVC video stream over the network and snapshot (JPEG) while streaming. |
mmf2_video_example_simo_init |
1 Video (H264/H265) -> 2 RTSP (V1, V2) |
Transmitting two H264/HEVC video streams from AmebaPro2 over the network, the source of the video is the same video stream. Video default format: max sensor specification. |
mmf2_video_example_array_rtsp_init |
ARRAY (H264/H265) -> RTSP (V) |
Transfer H264/HEVC stream array in AmebaPro2 over the network Video default format: 25FPS. |
mmf2_video_example_v1_param_change_init |
CH1 Video -> H264/H265-> RTSP (parameter change) |
Transfer AmebaPro2’s H264/HEVC video over the network and support dynamic adjustment of video parameters. The parameters of dynamic adjustment are Resolution, Rate Control Mode, Bit Rate in order. |
mmf2_video_example_h264_array_mp4_init |
ARRAY (H264/H265) -> MP4 (SD card) |
AmebaPro2 will record H264/HEVC stream array to the SD card for 30 second. Video default format: 25FPS. |
mmf2_video_example_md_rtsp_init |
CH1 Video -> H264/H265-> RTSP CH4 Video -> RGB -> MD |
RTSP video stream over the network. MD detect motion and draw the motion region to RTSP channel. |
mmf2_video_example_v12_adjust_framerate_init |
CH1 Video -> H264/H265->RTSP -> adjust framerate CH2 Video -> H264/H265->RTSP -> adjust framerate |
Transfer AmebaPro2’s H264/HEVC video stream over the network. Video default format: 1080P 30FPS, and then adjust framerate when streaming on. Transfer AmebaPro2’s H264/HEVC video stream over the network. Video default format: 720P 15FPS, and then adjust framerate when streaming on. |
mmf2_video_example_jpeg_external_init |
EXTERNAL DATA -> JPEG |
Use video HW encode any data (NV12, NV16…) to jpeg. The results will be saved to SD card as test_0001.jpg, test_0002.jpg… |
mmf2_video_example_bayercap_rtsp_init |
CH1 Video -> Bayer-> SD Card CH2 Video -> H264/H265-> RTSP |
Output raw data in bayer format and save to SD Card. Transfer AmebaPro2’s H264/HEVC video stream over the network. |
mmf2_video_example_v1_mask_init |
CH1 Video -> H264/H265-> RTSP |
In normal mode, setup privacy mask before opening video, and the stream output will include privacy mask. Transfer AmebaPro2’s H264/HEVC video stream over the network. |
mmf2_video_example_v1_rate_control_init |
CH1 Video -> H264/H265-> RTSP |
Transfer AmebaPro2’s H264/HEVC video stream over the network. It can auto adjust frame rate based on bit rate which is set by user. |
Video + Audio examples: (the max specification of the sensor is defined in projectrealtek_amebapro2_v0_exampleincsensor.h)
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_av_init |
1 Video (H264/H265) and 1 Audio -> AAC -> RTSP |
Transfer AmebaPro2’s H264/HEVC video and AAC sound stream over the network. Video default format: max sensor specification. |
mmf2_video_example_av2_init |
2 Video (H264/H265) and 1 Audio -> AAC -> 2 RTSP (V1+A, V2+A) |
Transmitting two H264/HEVC videos and AAC audio streams from AmebaPro2 over the network. The source of the videos is different ISP channel. The videos formats are set to the width, height and half of FPS with max sensor specification (V1), 720P and the FPS of max sensor specification (V2) respectively. |
mmf2_video_example_av21_init |
1 Video (H264/H265) and 1 Audio -> 2 RTSP (V+A) |
Transfer two copies of AmebaPro2’s H264/HEVC video (1080P 30FPS) and AAC sound stream through the network, the video source is the same ISP channel. |
mmf2_video_example_av_mp4_init |
1 Video (H264/H265) and 1 Audio -> MP4 (SD card) |
AmebaPro2 will record three videos (max sensor specification) to the SD card for 30 seconds each The default storage name is : AmebaPro2_recording_0.mp4 AmebaPro2_recording_1.mp4 AmebaPro2_recording_2.mp4 |
mmf2_video_example_av_rtsp_mp4_init |
Video (H264/H265) -> RTSP and mp4 AUDIO -> AAC -> RTSP and MP4 |
the network. Video default format: max sensor specification.
card for 30 seconds each. The default storage name is AmebaPro2_recording_0.mp4 AmebaPro2_recording_1.mp4 AmebaPro2_recording_2.mp4
Note: (1) video source of (2) is from the same ISP channel. |
mmf2_video_example_demuxer_rtsp_init |
Demux a mp4 file in SD card (based on record file name) to 1 Video and 1 Audio -> RTSP |
Demux a mp4 file (suggest to use a file created by AmebaPro2) and send the video and audio data through rtsp |
Video + NN examples:
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_vipnn_rtsp_init |
Video (H264/H265)-> RTSP (V1) Video (RGB) -> NN (V4) |
channel. (Please see NN chapter for more details) |
mmf2_video_example_md_nn_rtsp_init |
Video (H264/H265)-> RTSP (V1) Video (RGB) -> MD (V4) -> NN (V4) |
trigger NN module to detect object and draw the bounding box to RTSP channel. |
mmf2_video_example_vipnn_facedet_init |
Video (H264/H265)-> RTSP (V1) Video (RGB) -> NN face detect (V4) |
landmark to RTSP channel. (Please see NN chapter for more details about how to load face detection NN model) |
mmf2_video_example_face_rtsp_init |
Video (H264/H265)-> RTSP (V1) Video (RGB) -> NN face detect (V4) -> NN face recognition |
landmark to RTSP channel. (Please see NN chapter for more details about how to load face detection/recognition NN model) |
mmf2_video_example_vipnn_facedet_sync_init |
Video (H264/H265) -> RTSP (V1) Video (H264/H265) -> RTSP (V2, Sync mode) Video (RGB) -> NN face detect (V4) |
landmark to RTSP channel. (Please see NN chapter for more details about how to load face detection NN model) |
mmf2_video_example_vipnn_facedet_sync_snapshot_init |
CH1 Video -> JPEG (SNAPSHOT, Sync mode) Video (RGB) -> NN face detect (V4) |
NN do face detection then draw the bounding box and face landmark to JPEG. The results will be saved to SD as test_0001.jpg, test_0002.jpg… |
mmf2_video_example_fd_lm_mfn_sim_rtsp_init |
Video (H264/H265) -> RTSP (V1) RGB -> NN face detect (V4) -> NN landmark detect -> NN face recognition |
|
Audio + NN examples:
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_audio_vipnn_init.c |
AUDIO -> NN |
The sound received by AmebaPro2 can be transmitted to NN engine to do sound classification. Please see NN chapter for more details |
Execution and testing
Before executing example, it is necessary to set up console tool first (Tera Term, MobaXterm or PuTTY……) and configure serial port baud to 115200. Once the setting is completed, AmebaPro2 is also connected with the PC and booted to get the Log message output of AmebaPro2.
For examples with rtsp stream, we must first set up AmebaPro2 to connect with the network. Use AT command below to do the connect with an AP device:
ATW0=<Name of WIFI SSID> => Set the WiFi AP SSID to be connected
ATW1=<Password> => Set the WiFi AP password, if needed
ATWC => Initiate the connection
When the “RTSP stream enabled” message shown on console, it indicates that the RSTP server is already running. You can use VLC player to check the rtsp stream. For rtsp usage can refer to VLC media player settings.
MMF AT command
MMF video examples provide commands for user to refer the audio reset and de-initialize the MMF and linker modules
UC=TD: use for de-initialize the whole flow of corresponding examples
UC=TSR: reset the whole system
VLC media player settings
For RTSP examples, you can use VLC media player to receive or transmit the stream. Download VLC media player from website https://www.videolan.org/.
Stream audio/video from AmebaPro2 to VLC player
Click “Media” -> “Open Network Stream”.
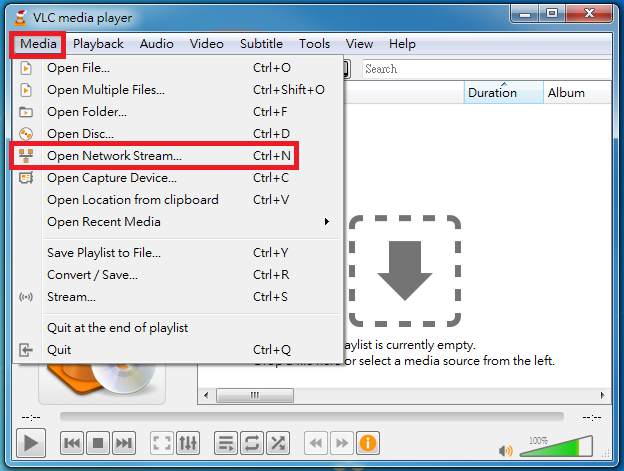
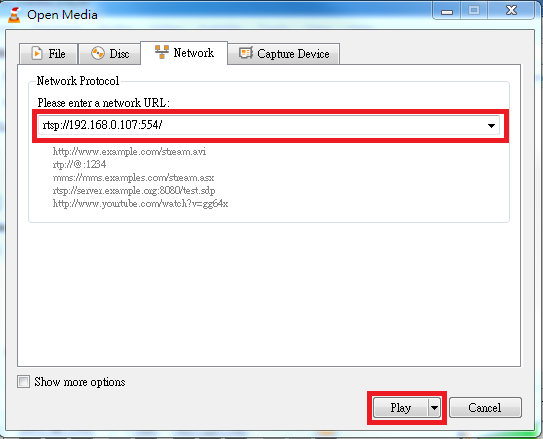
Enter “rtsp://xxx.xxx.xxx.xxx:yyy/”, where xxx.xxx.xxx.xxx is the Ameba IP address and yyy is the RTSP server port (default is 554), and click “Play”.
Stream audio from VLC player to AmebaPro2
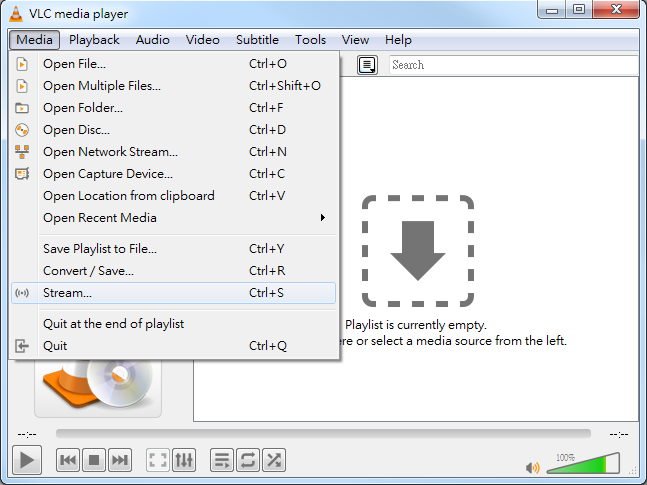
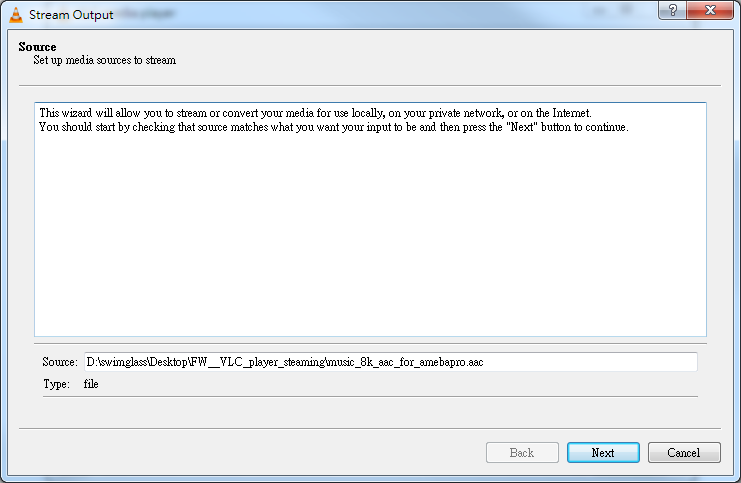
Click “Media” -> “Stream”.
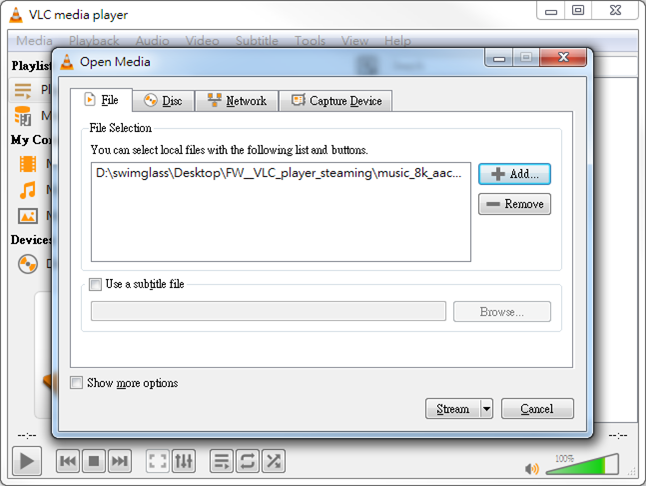
Select “File”, choose the file by “Add” and finally click the “Stream”. (If the startup example is RTP -> AAD -> AUDIO please select the audio file with the file name .aac (The file format must be the same as the AAC decoder setting, the default is mono, sampling rate = 8k Hz). If the startup example is RTP -> G711D -> AUDIO, please select the audio file with the file extension .wav). If the startup example is RTP -> OPUSD -> AUDIO, please select the audio file with the file name .opus)
You will see your select file after push “Stream”. Check it and click “Next”.
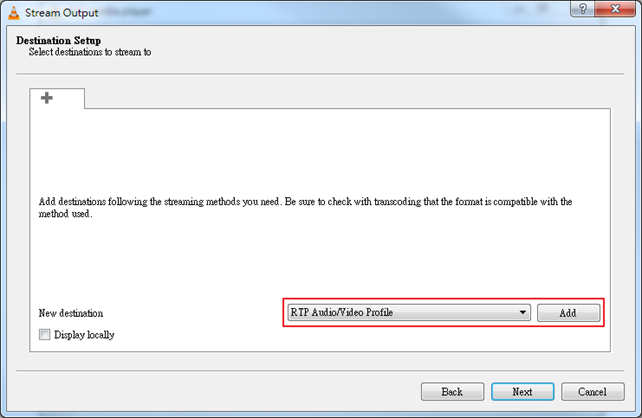
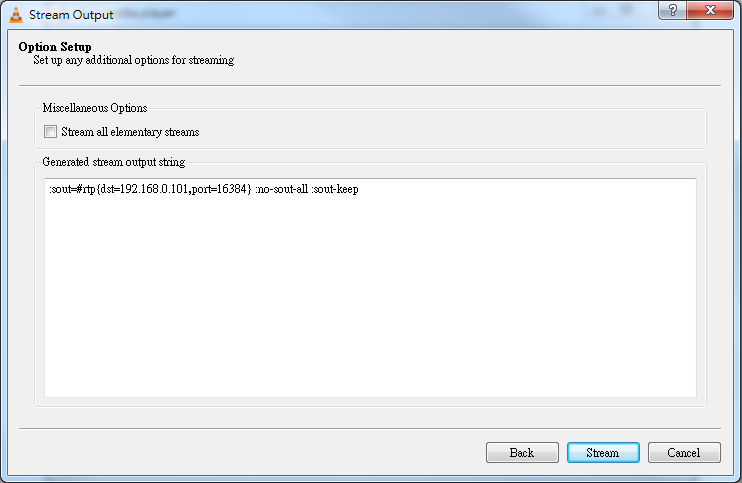
Select “RTP Audio/Video Profile”, and click “Add”.
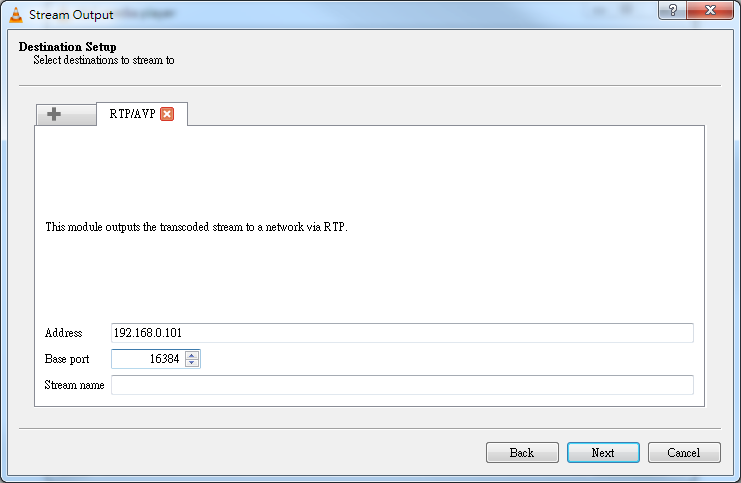
Enter AmebaPro’s IP Address in “Address” field, with “Base port” set to 16384, and click “Next”.
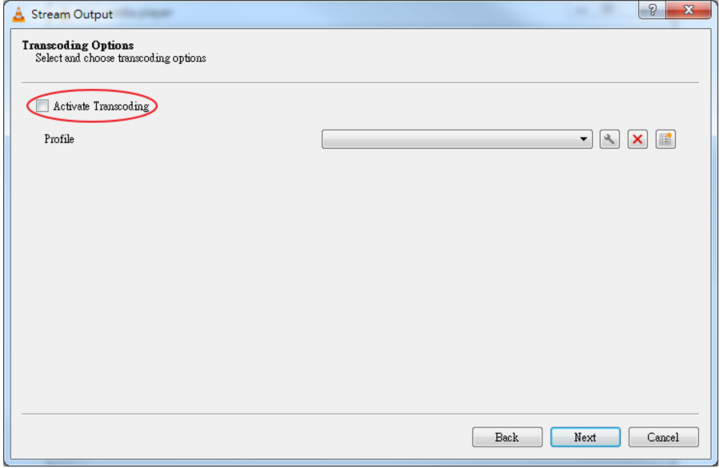
Confirm “Activate Transcoding” is unchecked, and click “Next” -> “Stream”. Then the sound can be heard on AmebaPro2 3.5mm audio jack.
Adjust latency (buffer) related settings
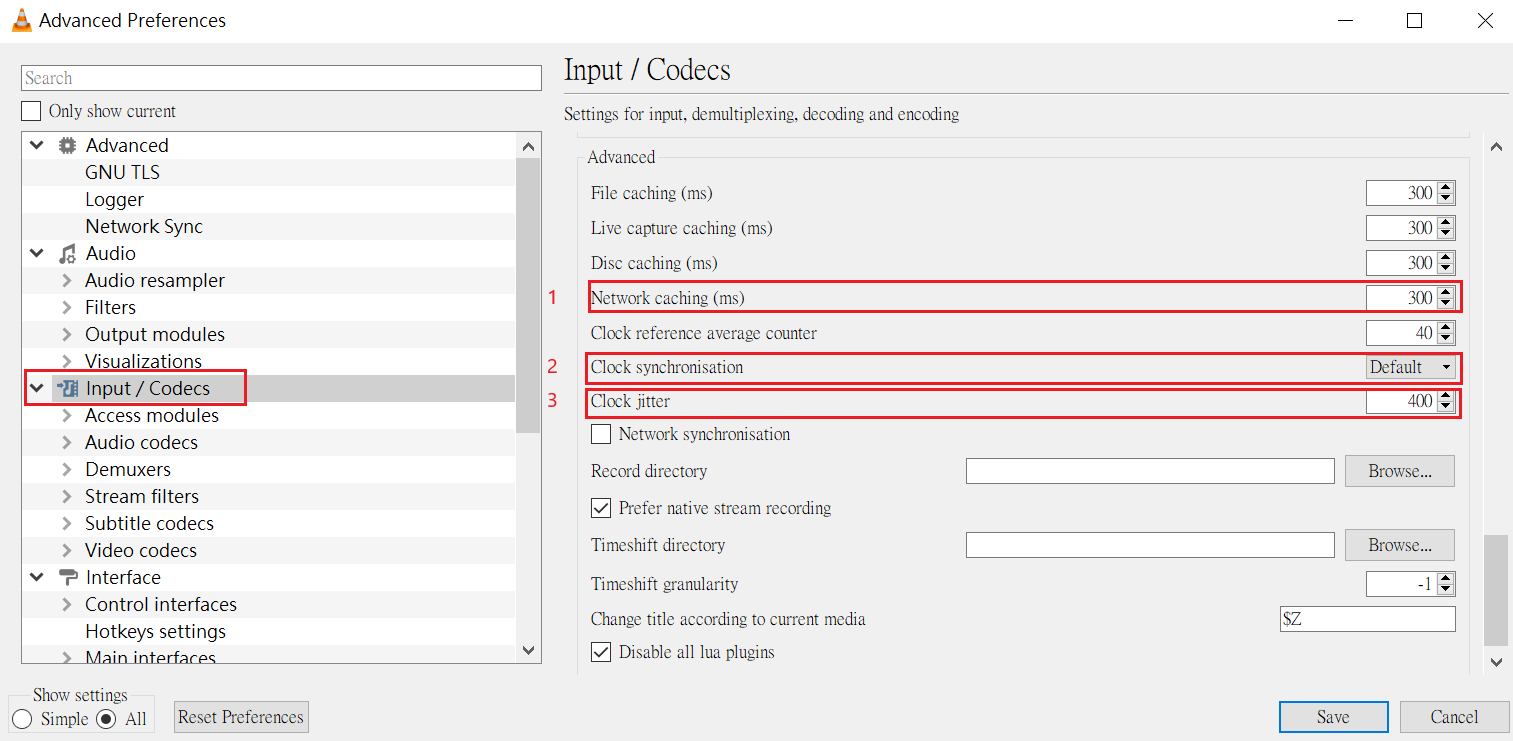
Click “Tools” -> “Preferences” -> “Show settings: All” (lower left corner) -> “Input/ Codecs”, (1) set “Network caching” to 300ms (recommended), (2)set “Clock synchronisation” to Default, (3) set “Clock jitter” to 400ms (recommended).
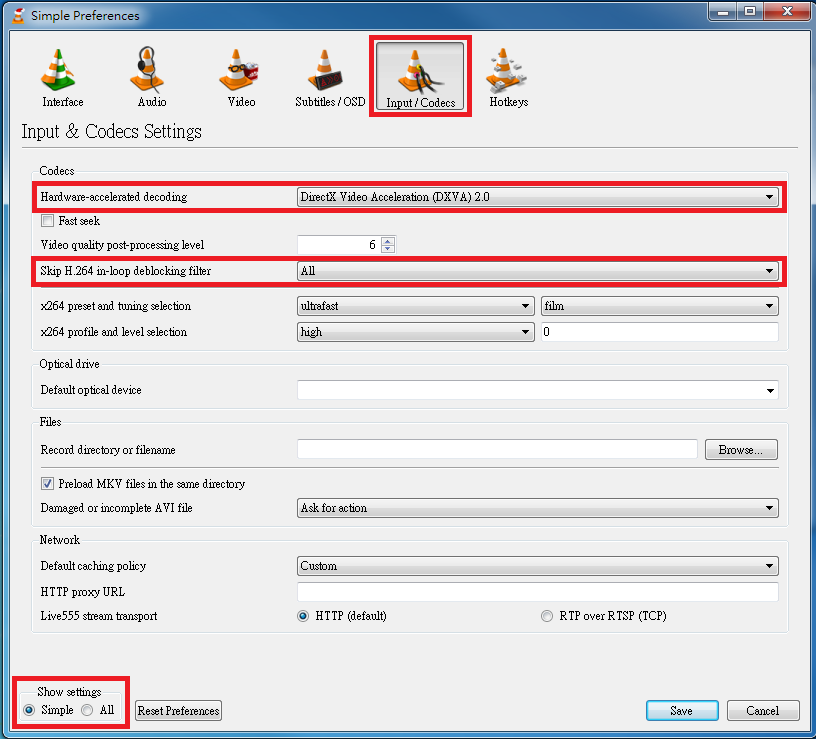
Click “Tools” -> “Preferences” -> “Show settings: Simple” (lower left corner) -> “Input/ Codecs”. Enable “Hardware-accelerated decoding” if available, and set “Skip H.264 in-loop deblocking filter” to “All”.
VLC have a pts_delay buffer by “network buffer” and “clock jitter”. The maximum value of this buffer is equal to “network buffer” plus “clock jitter”. The video display on the VLC side will delay due to the increase of pts_delay buffer. By reducing the “network cache” and “clock jitter” can achieve the effect of shortening the delay.
Echo Cancellation
Echo cancellation is default provided in the audio part of MMF. To test whether the echo cancellation function is correct, use VLC media player to verify it on the computer.
Usage Note (Refer to Audio optimization chapter):
Sample rate must be 8K Hz/16K Hz
Frame size must be the multiplies of 10ms ( suggest to be 10ms or 20ms about 160 samples and 320 samples)
Two input signals must keep unchanged during AEC_process.
Time for executing AEC_process must be under 10ms or 20ms (up on the frame size).
Please check microphone and speaker signal and make sure there is no clipping signal.
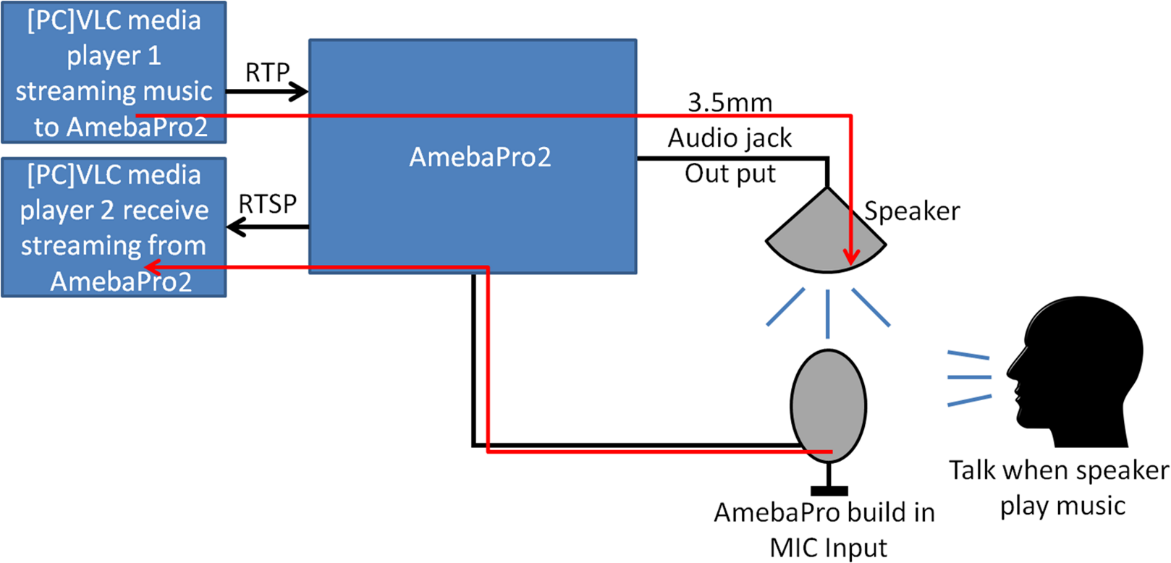
The verification method is as follows:
Use VLC media player on the PC to stream voice signal to AmebaPro2.
Put AmebaPro2 speaker next to AmebaPro2 built-in Mic and speak at the same time.
Then pass the received sound to the VLC media player on the PC via AmebaPro2 to see if the sound in step 1 is small enough or even disappear.
AV SYNC
Timestamp
In all of the mmf modules in SDK, the timestamps is obtained by functions mm_read_mediatime_ms_fromisr() (using in isr) and mm_read_mediatime_ms (using in non-isr). If user want to sync the time with the mmf modules, please use these two functions to obtain the timestamps.
Sync audio and video first frames by dummy packets
In some situation, user may need to sync the first frames of the audio and video. In ameba Pro2 SDK, we provide a method by inserting audio dummy packets to sync the video first frame.
To sync the first frame, user could set the audio ctx by setting mmf command CMD_AUDIO_SET_AVSYNC_TIMESTAMP to the video first timestamp. The audio module will insert the enough dummy packets to output queue till the audio output queue is full. In mmf2_video_example_joint_test_rtsp_mp4_init_fcs example, it will show the sample for how to add the audio dummy frames to sync the first video frame’s timestamp of the fcs process.
The following code shows how to set up the audio dummy frames parameters.
//waiting until get the fcs first frame information
void fcs_avsync(bool enable)
{
if (enable) {
//get the fcs time need to what video first frame
int fcs_video_starttime = 0;
int fcs_video_endtime = 0;
while (!fcs_video_starttime) {
vTaskDelay(1);
video_get_fcs_queue_info(&fcs_video_starttime, &fcs_video_endtime);
}
mm_module_ctrl(audio_ctx, CMD_AUDIO_SET_AVSYNC_TIMESTAMP, fcs_video_starttime);
}
}
Besides the parameters’ setting, user also needs to modify the audio output queue length. The following code shows the sample about how to approximate the audio output queue length.
audio_params.avsync_en = 1;
uint32_t audio_expected_queue = 800; //set 800 length as the maximum value
uint32_t audio_apply_time = mm_read_mediatime_ms();
uint32_t audio_frame_ms;
mm_module_ctrl(audio_ctx, CMD_AUDIO_GET_FRAMESIZE_MS, (int)&audio_frame_ms);
if (audio_frame_ms) {
if (audio_expected_queue > (audio_apply_time - isp_fcs_info->fcs_start_time) / audio_frame_ms) {
audio_expected_queue = (audio_apply_time - isp_fcs_info->fcs_start_time) / audio_frame_ms;
}
}
printf("audio length = %d\r\n", audio_expected_queue);
mm_module_ctrl(audio_ctx, MM_CMD_SET_QUEUE_LEN, audio_expected_queue); //Add the queue buffer to avoid to lost data.